قام مهندسون من جامعة كامبريدج بتطوير يد روبوتية ناعمة مطبوعة عليها
استخدم الباحثون المطبوعيد مجسمة مزروعة بأجهزة استشعار باللمس في طابعة ثلاثية الأبعاد بحيث يمكن لليد "الشعور" بما تلمسه. كانت اليد قادرة فقط على الحركة السلبية على أساس المعصم. يقول المؤلفون: "الميزة الكبيرة لهذا التصميم هي مدى الحركة التي يمكننا الحصول عليها دون استخدام أي مشغلات".
تدريب ذراع آلية "سلبية". فيديو: جامعة كامبريدج
أجرى العلماء أكثر من 1200 اختبار بذراع روبوت ،يراقب قدرتها على الإمساك بالأشياء الصغيرة دون إسقاطها. في البداية ، تم تدريب الروبوت باستخدام كرات بلاستيكية صغيرة مطبوعة ثلاثية الأبعاد وتمسك بها باستخدام إجراءات محددة مسبقًا مستمدة من المظاهرات البشرية.
استخدم الروبوت التجربة والخطأ فياكتشف الالتقاط الذي سيكون ناجحًا. بعد الانتهاء من تدريب الكرة ، حاول الإمساك بأشياء مختلفة ، بما في ذلك الخوخ ، وماوس الكمبيوتر ، ولفافة الفقاعات. في هذه الاختبارات ، تمكنت اليد من الإمساك بنجاح بـ 11 عنصرًا من أصل 14 عنصرًا.
التقاط كائنات مختلفة الأحجام والأشكال والقوام- مهمة بسيطة بالنسبة للإنسان ، ولكنها صعبة بالنسبة للإنسان الآلي. معظم الروبوتات المتقدمة اليوم ليست قادرة على أداء المهام المتلاعبة التي يمكن للأطفال الصغار التعامل معها بسهولة. على سبيل المثال ، يعرف الناس غريزيًا مقدار القوة التي يجب تطبيقها لرفع بيضة ، ولكن بالنسبة للروبوت ، فهذه مشكلة: عدم القوة الكافية ستؤدي إلى سقوط الجسم ، وستؤدي القوة الشديدة إلى كسر البيضة.
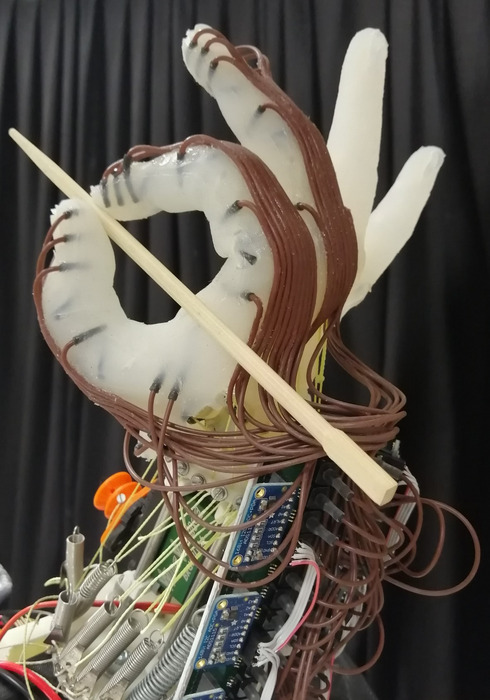 النموذج الأولي للقابض الآلي. الصورة: جامعة كامبريدج
النموذج الأولي للقابض الآلي. الصورة: جامعة كامبريدج
تقنية متطورة بأصابع آليةتتطلب كمية كبيرة من الطاقة وعددًا كبيرًا من المحركات المعقدة والمكلفة لكل مفصل. إن القبضة السلبية التي اقترحها المهندسون تجعل التحكم في الروبوت أسهل بكثير وأكثر كفاءة في استخدام الطاقة. يعتقد الباحثون أن تصميمهم القابل للتكيف يمكن استخدامه لتطوير روبوتات منخفضة التكلفة قادرة على القيام بحركات أكثر طبيعية.
قراءة المزيد:
انظر إلى أعلى خريطة دقة للمريخ: 110.000 إطار و 5.7 تريليون بكسل
"بحر" الكواركات داخل بروتون واحد: مما يتكون الجسيم الأولي
الصورة الجديدة لهابل حيرت العلماء
على الغلاف: نموذج أولي للمقبض الآلي. الصورة: جامعة كامبريدج