لا يستطيع الروبوت التحرك فحسب، بل يمكنه أيضًا التعامل مع الأشياء. وفقا للمؤلفين، اليوم الطلب على
لذلك، قدم مؤلفو الورقة الجديدة تصميمًا يعتمد على آلية الأطراف المجهزة بمؤثرات نهائية مختلفة لتحسين الأداء.
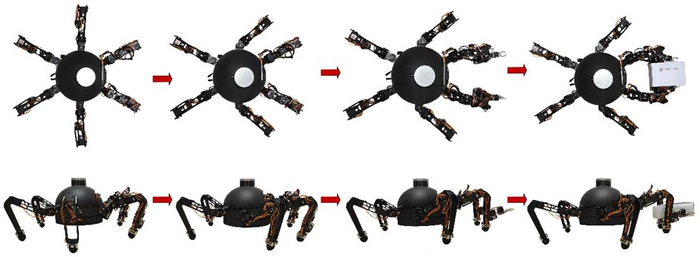
لاحظ الفريق أن التلاعب أثناءفالحركة طريقة جيدة لزيادة الكفاءة وكسب الوقت. أطلق على الروبوت الجديد اسم ALLOMAN hexapod، وبفضل تكامل الساقين والذراعين، يستطيع الروبوت التعامل مع الأشياء المتحركة.
حتى الآن ALLOMAN hexapod هو تجريبيالنموذج المبدئي. في المرحلة التالية من العمل ، سيقدم المؤلفون المزيد من الوظائف للتلاعب بها. يخطط المؤلفون لاستخدام تطويرهم في المناطق التي تحتاج إلى منصات متعددة الوظائف ، على سبيل المثال ، لضمان أمن المدينة ومكافحة الإرهاب واستكشاف الكواكب.
قراءة المزيد:
لقد تم اصطياده لقرون: ماذا نعرف عن كوكب فولكان المجاور للشمس
وجد علماء الفلك كوكبًا بالقرب من الأرض: له مدار غريب جدًا
الازدواجية غير المبررة الموجودة في فيزياء الجسيمات الأولية: ما الذي ستؤدي إليه