قدم باحثون من المعهد الإيطالي للتكنولوجيا نموذجا أوليا لروبوت ثلاثي الأرجل
تتكون منصة MARM الروبوتية منجسم مركزي وثلاثة أطراف وجهاز إرساء خاص. يستخدم الأخير لشحن الجهاز وتبادل البيانات. عند إنشاء روبوت ، قدم العلماء إمكانية العمل في كل من وجود الجاذبية والجاذبية الصغرى.
روبوت مارم. فيديو: آي آي تي
يمكن لروبوت MARM استخدام ثلاثة أطرافالحركة عن طريق الاستيلاء على الوصلات القياسية على أسطح المحطات والزحف فوقها. بالإضافة إلى ذلك ، يمكنها تجميع مكونات الأجهزة المختلفة ووضعها ، مثل نقل وتركيب الألواح السداسية المعيارية بعرض 1.2 متر المستخدمة في محطة الفضاء الدولية ، ومعالجة المكونات الإضافية المدارية.

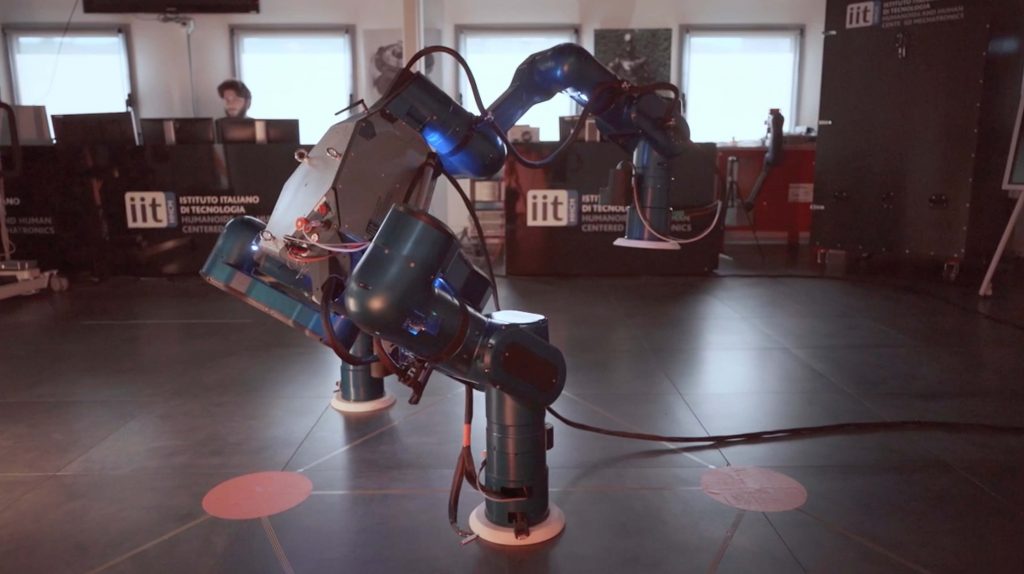
روبوت مارم. الصور: آي آي تي
تكوين الأطراف الثلاثة - أساسيالفرق بين الروبوت الجديد والتطورات السابقة. هذا ، وفقًا للمهندسين ، يوفر مرونة أكبر في تشغيل الجهاز. على سبيل المثال ، يمكنه استخدام "يدين" للعمل ، والتمسك بالسطح بمساعدة اليد المتبقية.
يقترح الباحثون استخدام MARM لـاستلام البضائع من المستودع ونقلها إلى المكان الصحيح وجمعها ووضعها. سيتم اختبار النموذج الأولي في الجاذبية الصغرى مع وضع هذا السيناريو في الاعتبار ، وبعد ذلك سيتم إنشاء نسخة عمل لإرسالها إلى محطة الفضاء الدولية.
قراءة المزيد:
علماء من منطقة التربة الصقيعية: كيف يطورون ملابس ذكية ولقاح ضد السرطان
تم العثور على كواكب ليست بعيدة عن الأرض. ربما هم مأهولون
اكتشف العلماء من استفاد من موت الديناصورات