تتيح طريقة التعلم التي يقترحها علماء الروبوتات للروبوت أن يتعلم بشكل مستقل أداء مناورات السباحة.
"في دراستنا قدمناوقال جانج تشين، أحد مؤلفي التطوير: "إنها طريقة للتحكم في التعلم المعزز بيولوجيًا لمحاكاة حركة الروبوتات تحت الماء". "تعتمد هذه الطريقة على أحد أعمالنا السابقة حول حركة القندس، والتي تم نشرها في مجلة Springer Link's Journal of Intelligent & الأنظمة الروبوتية".
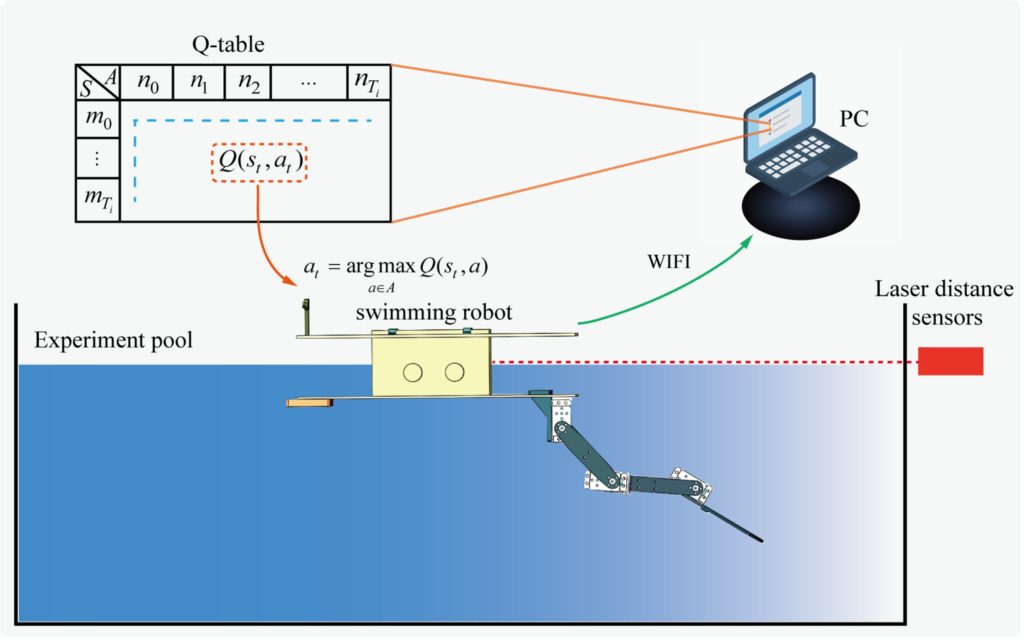 مبدأ تدريب إنسان القندس
مبدأ تدريب إنسان القندس
الروبوتات تحت الماء مثل تلك التي صنعها تشين ورفاقهالزملاء هم أنظمة غير خطية ، وتنطوي حركاتهم على ديناميات مائية معقدة. وبالتالي ، فإن نمذجة حركتهم بدقة يمكن أن تكون مهمة معقدة للغاية تتطلب موارد حسابية كبيرة.
على عكس نماذج التحكم في الغواصات الأخرىلا يتطلب النهج الروبوتي الذي طوره تشين وزملاؤه تكامل نماذج الحركة المعقدة القائمة على ديناميكيات السوائل. هذا يرجع إلى حقيقة أنه يقوم على تبسيط الأفكار حول عمل المفاصل المسؤولة عن السباحة في القنادس. هذا يجعل من السهل تدريب النموذج ويقلل أيضًا من الحركات غير الفعالة للروبوت أثناء التدريب.
"من خلال الجمع بين التعلم المعزز معوأوضح تشين أنه الآليات الكامنة وراء سلوك السباحة للقنادس ، فإن طريقتنا تطبق سيطرة الروبوت على السباحة بأسرع ما يمكن وكفاءة. "الميزة الأكثر بروزًا هي أنها تتجنب إنشاء نماذج معقدة للتحكم في الحركة وتنفذ بسرعة التحكم في السباحة لروبوت ذي ساق واحدة يشبه القندس."
قراءة المزيد
القمر الصناعي الأمريكي "رأى" رسالة غير عادية من الأرض
فيديو منشور من الصاروخ الذي انطلق من معجل تجريبي
الوحش في مركز مجرتنا: انظر إلى صورة ثقب أسود في مجرة درب التبانة