باحثون من معهد أبحاث إيدياب في سويسرا، والجامعة الصينية في هونغ كونغ (CUHK) و
"عملنا الأخير هو عمل مشتركثلاثة مختبرات. لاحظ الباحثون أننا ندرس هذه التقنية منذ حوالي عشر سنوات ونحن مهتمون بإنشاء روبوتات ذكية يمكنها طهي الطعام للناس.
قرروا التركيز على اللغة الصينيةفنون الطهي ، ولا سيما القلي العميق ، وهي تقنية تتضمن قلي المكونات على حرارة عالية ، حيث يجب تقليبها باستمرار. لاحظ العلماء أنه "على الرغم من حقيقة أن مثل هذه الروبوتات قد تم تطويرها بالفعل في السنوات الأخيرة ، إلا أن إنشاء طاهٍ آلي في بيئة مطبخ شبه منظمة لا يزال مهمة هائلة".
وأضافوا أن الآلية الجديدة تدرسالتنسيق كمشكلة التسلسل بين حركات كلتا اليدين واستخدام النموذج المشترك للمحول و GNN لهذا الغرض. لذلك ، في عملية تفاعلية ، يتم تصحيح حركة اليد اليسرى وفقًا للتعليقات المرئية ، ويتم إنشاء الحركة المقابلة لليد اليمنى بواسطة نموذج محول الهيكل المدرب مسبقًا بناءً على حركات اليد اليسرى.
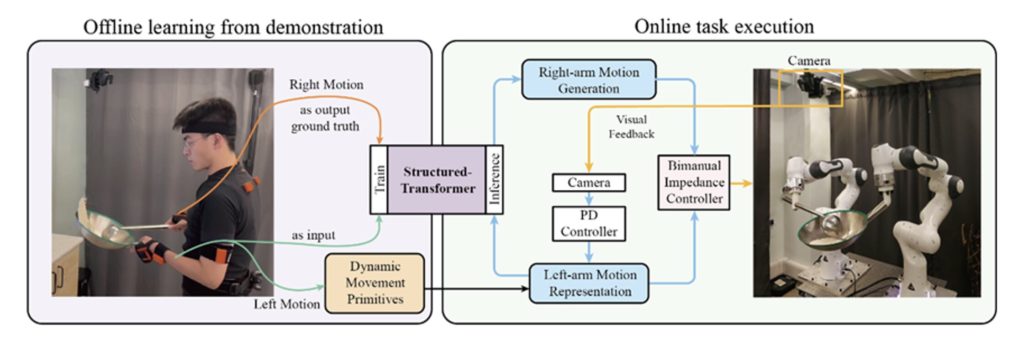
صنف الباحثون أداء نموذجهم على أنهالمحاكاة وعلى منصة روبوتية مادية. في هذه الاختبارات ، سمح النموذج للروبوت بإعادة إنتاج الحركات المرتبطة بطهي البطاطس المقلية بنجاح وواقعية.
في المستقبل ، النموذج الذي قدمته المجموعةالباحثين ، قد يسمحون بتطوير روبوتات قادرة على الطهي في المنزل والأماكن العامة. بالإضافة إلى ذلك ، يمكن استخدام نفس الأسلوب لتدريب الروبوتات على مهام أخرى تتضمن استخدام اليدين والذراعين.
"الآن سوف نقدم بعدا أعلىلاحظ العلماء معلومات لدراسة حركات الإنسان عند العمل في المطبخ ، على سبيل المثال ، الإشارات البصرية وإشارات تخطيط كهربية العضل. "وبالتالي ، فإننا نخطط أيضًا لتقديم نظام أكثر تعقيدًا يتضمن كلاً من حركات المتلاعبين ثنائيي الحركة والتغيير في حالة الكائن."
قراءة المزيد
أظهر المحاكي الكمومي تقسيم الإلكترون إلى أجزاء في فضاء أحادي البعد
ابتكر الفيزيائيون ليزرًا ذريًا يمكنه العمل إلى الأبد
تم العثور على كواكب ليست بعيدة عن الأرض تشبه إلى حد بعيد كوكبنا