يجمع النموذج الجديد بين الروبوتات وديناميكيات السوائل والميكانيكا الحيوية، وبالتالي فإن الروبوت الجديد الذي يشبه السمكة
تم تصميم الغواصات عادةً لسرعة إبحار واحدة، وغالبًا ما لا يمكنها التحرك بشكل أسرع أو أبطأ. ولكن يمكن استخدام الروبوت الجديد حتى في المهام متعددة السرعات.
دان كوين، أستاذ مشارك، كلية الهندسة والعلوم التطبيقيةاكتشف علماء من جامعة فيرجينيا وزملاؤه كيفية تصميم مركبات تحت الماء بسرعات متغيرة. كانت الفكرة هي صنع ذيل السمكة بصلابة قابلة للتعديل: اعتمادًا على مستواه، يمكنك تحقيق سرعات مختلفة.
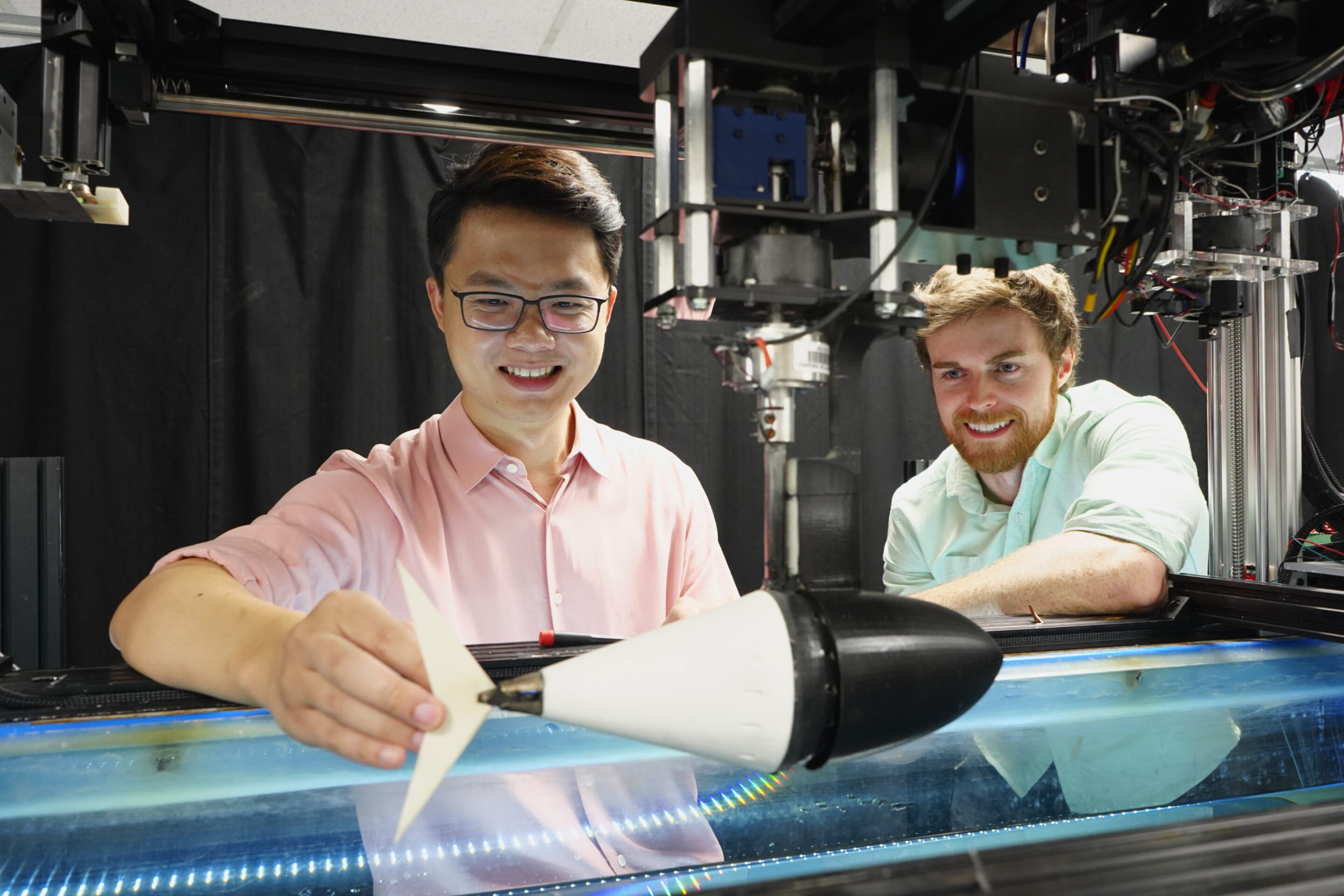
المشكلة هي أنه لا توجد طريقة معروفةقم بقياس صلابة ذيل سمكة السباحة، لذلك من الصعب أن نفهم على أي أساس يتغير هذا المؤشر في البيئة الطبيعية. قام كوين وتشونغ بحل هذه المشكلة من خلال الجمع بين ديناميكيات الموائع والميكانيكا الحيوية لإنتاج نموذج لكيفية وسبب ضبط صلابة الذيل. ونتيجة لذلك، استنتجوا الصيغة: تصبح الصلابة أعلى مع زيادة مربع سرعة السباحة.
ولاختبار النظرية، قاموا ببناء روبوت يشبه السمكة مزود بوتر صناعي قابل للبرمجة لضبط صلابة ذيله أثناء السباحة.
ونتيجة لذلك، أصبح الروبوت قادرًا على السباحة ضمن نطاق أوسع من السرعات وإهدار طاقة أقل من الروبوتات ذات الصلابة الثابتة.
قراءة المزيد:
شاهد أسرع طائرة تفوق سرعتها سرعة الصوت
تسبب تباطؤ دوران الأرض في إطلاق الأكسجين على الكوكب
ماذا يحدث للعملات المشفرة: من الصعود والهبوط إلى اعتراف الدولة