Авторите на новата работа предположиха, че моделите се обучават най-добре с помощта на прогнозиране
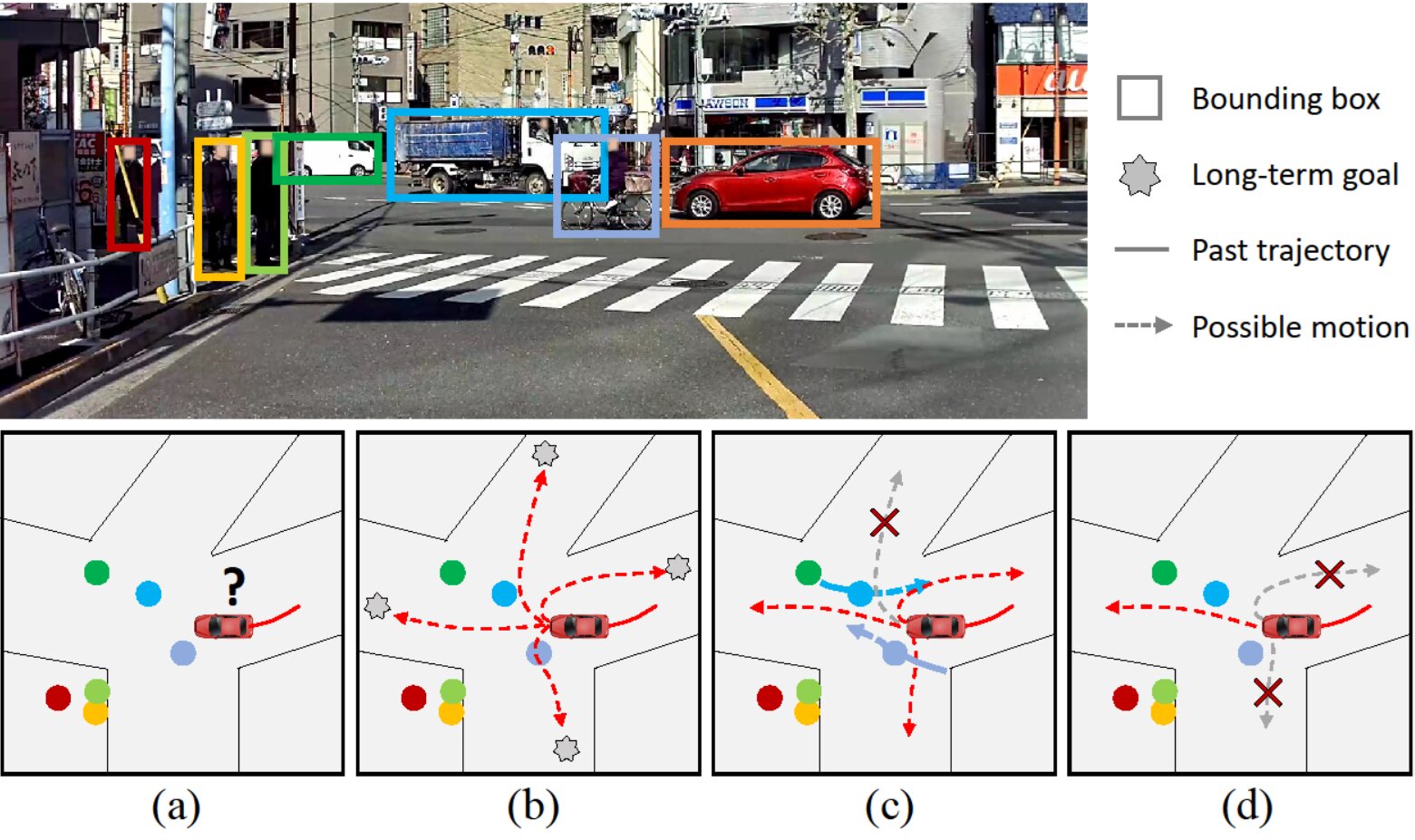
Изследователите планират да разработят архитектура, която взема предвид както краткосрочните, така и дългосрочните цели – това са основните компоненти при оценката на намеренията на пешеходец или автомобил.
Например има кола, която е на кръстовищеиска да завие наляво. Важно е да се вземе предвид не само динамиката на транспорта, но и как намерението може да се промени в зависимост от различни фактори: поради собственото желание, други участници в движението или пречки.
След това алгоритъмът първо кодира миналия опит, на който моделът е обучен, за да предскаже какви могат да бъдат дългосрочните и краткосрочните последствия.
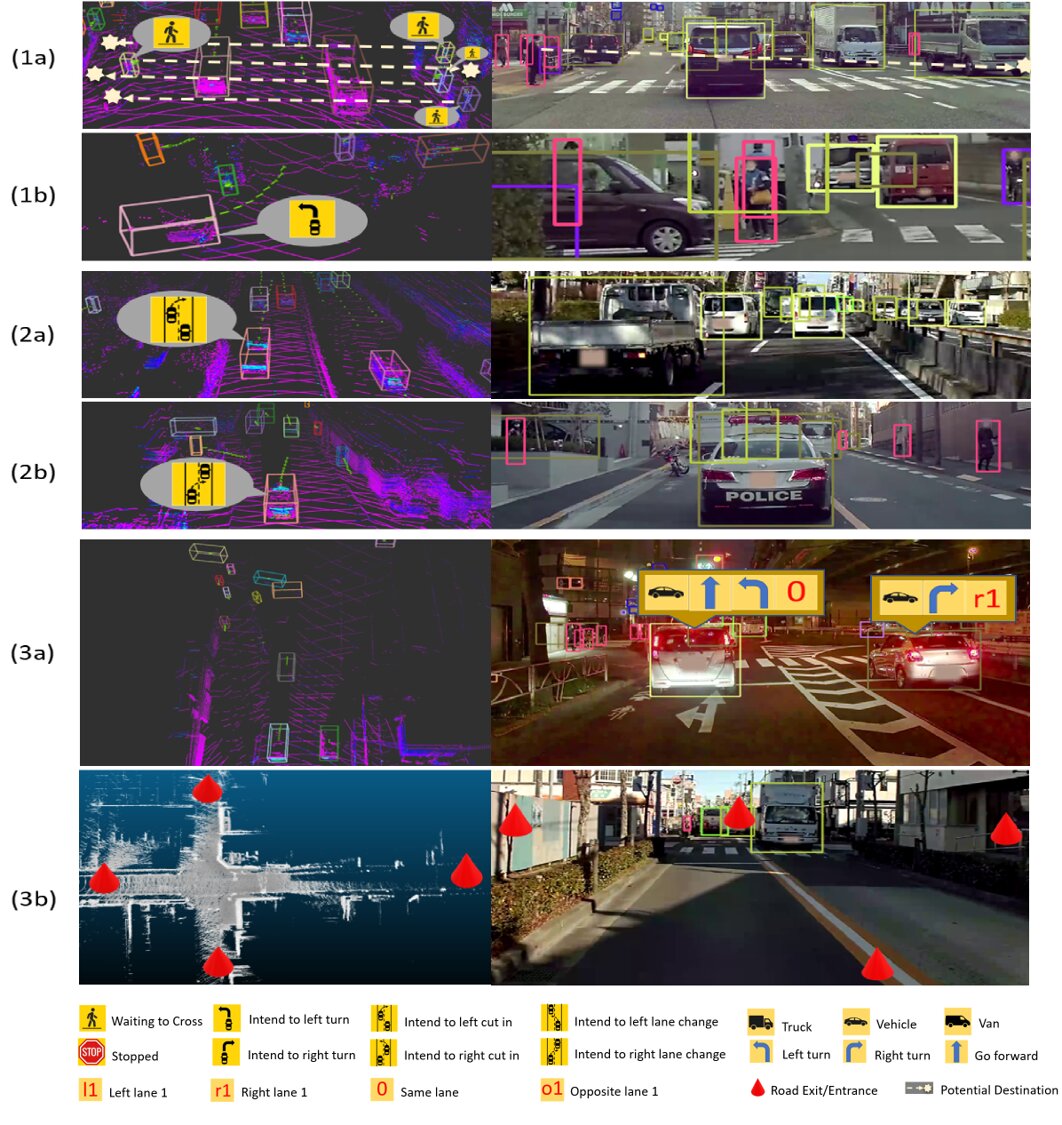
Моделът присвоява на всички околни обектисигналите са „намерения“, които могат да се променят по пътя, „среда“, като пътни знаци и дървета, които влияят върху намеренията на агентите, и „контекстуални сигнали“, като времето и пътните условия.
Изследователите оцениха своя модел в серия от тестове и установиха, че той превъзхожда други най-съвременни методи за прогнозиране на траекторията с 27%.
Разработчиците смятат, че моделът може да бъдеизползвани за подобряване на безопасността и производителността на автономни превозни средства. В допълнение, други изследователски групи могат да използват набора от данни LOKI за изготвяне на свои собствени модели за прогнозиране на пътищата на пешеходци и превозни средства по пътя.
Чета Допълнително:
Нов iOS 15: дата на издаване, дизайн и функции на iPhone. Разказваме всичко, което е известно
Изработен е изключително тънък материал от бял графен. Той ще замени сървърите
Вижте тежък атакуващ дрон, който носи тон оръжия