Методът на обучение, предложен от роботици, позволява на робота да се учи автономно да извършва плувни маневри.
„В нашето проучване ние представихмеметод за контрол на обучението за биологично подсилване за симулиране на движението на подводни роботи“, каза Ган Чен, един от авторите на разработката. „Този метод се основава на една от нашите предишни работи върху движението на бобър, публикувана в Springer Link’s Journal of Intelligent & Роботизирани системи".
 Принципът на обучение на робота бобър
Принципът на обучение на робота бобър
Подводни роботи като този, създаден от Чен и неговитеколегите са нелинейни системи и техните движения включват сложна хидродинамика. По този начин, точното моделиране на тяхното движение може да бъде много сложна задача, изискваща значителни изчислителни ресурси.
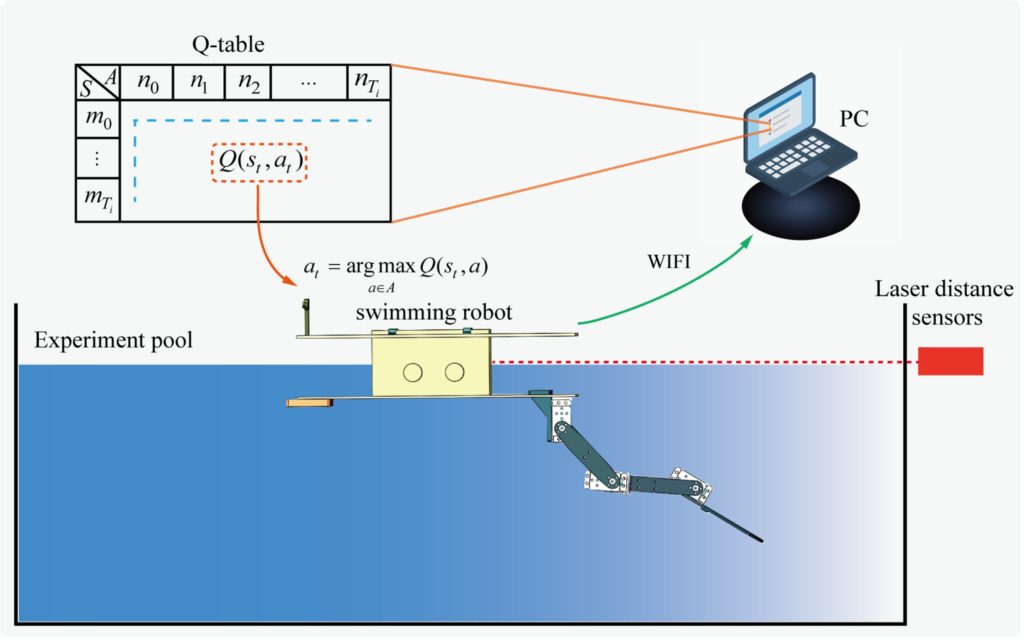
За разлика от други модели за управление на подводнициРоботизираният подход, разработен от Чен и колегите му, не изисква интегриране на сложни модели на движение, базирани на динамиката на флуидите. Това се дължи на факта, че се основава на опростяване на идеите за работата на ставите, отговорни за плуването при бобри. Това улеснява обучението на модела и също така намалява неефективните движения на робота по време на тренировка.
„Като комбинирате ученето с подсилване смеханизми, лежащи в основата на плувното поведение на бобрите, нашият метод реализира контрола на робот върху плуването възможно най-бързо и ефективно“, обясни Чен. „Най-забележителното предимство е, че избягва създаването на сложни модели за управление на движението и бързо прилага контрола за плуване на подобен на бобър еднокрак робот.“
Прочетете още
Американският спътник "видя" необичайно съобщение от Земята
Публикувано видео от ракетата, която беше изстреляна от експериментален ускорител
Чудовището в центъра на нашата галактика: погледнете снимката на черна дупка в Млечния път