Професор Едуард Андерсън от Масачузетския технологичен институт и неговата докторантка Сандра Лиу
Дръжката се състои от два гъвкави оребрени пръста,които се адаптират към формата на обекта, с който са в контакт. Тези пръсти, както в много подобни разработки, са направени от гъвкави пластмасови материали на 3D принтер. Въпреки това, в своя робот инженерите премахнаха напречните ребра, разположени от вътрешната страна на пръстите и им придадоха твърдост. Вместо това изследователите инсталираха камера и сензори.
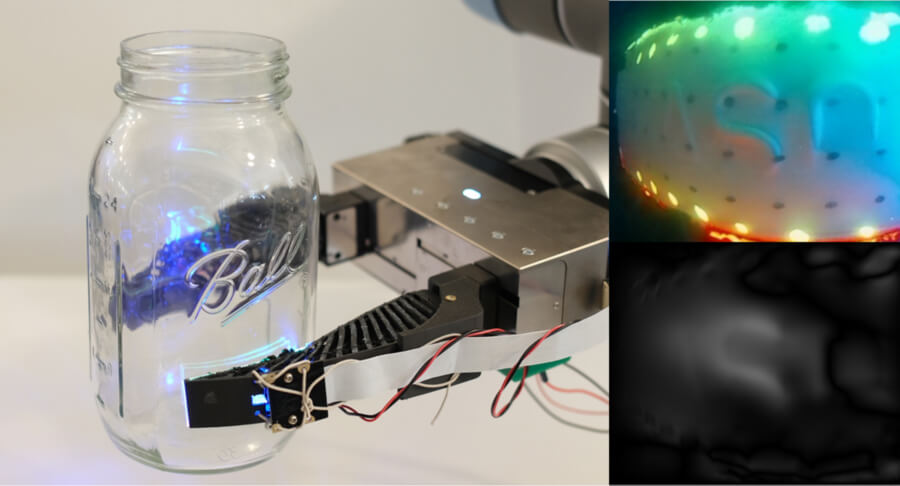
От външната страна на кухината се поставя тънък акрилен лист, към който са прикрепени "чувствителни" силиконови гел подложки.В дълбочината на кухината се поставя камера, насочена към акрилния слой, а цялата кухина се осветява от светодиоди.
При докосване на предмет пръстът нежно се увивато, сливайки се с контурите на обекта. Камерата и специални алгоритми анализират промяната в силиконовите и акрилните листове. Въз основа на анализа роботът определя общата форма на обекта, неравностите на повърхността, ориентацията на обекта в пространството и силата, с която е необходимо да се компресира обектът.
Изследователите тестваха своитезаснемете, като накарате само един от двата пръста да се докоснат. Създаденото от тях устройство успешно манипулира различни предмети, като мини отвертка, пластмасова ягода, туба боя и чаша вино. В същото време, при заснемане на ягоди, вътрешният сензор успява да открие успешно зърнестостта на повърхността му, а при работа с буркан може да разчете гравираното име.
 Източник: Лаборатория за компютърни науки и изкуствен интелект на MIT
Източник: Лаборатория за компютърни науки и изкуствен интелект на MIT
Както отбелязват авторите на работата, стъклени предметипредставляват предизвикателство за сензорите за компютърно зрение поради пречупването на светлината. Тактилните сензори ви позволяват да заобиколите това ограничение. Когато дръжката повдигна чашата, той усети ориентацията на стеблото в пространството и можеше да се увери, че стъклото сочи нагоре, преди да го спусне на масата.
Инженерите отбелязват, че създаването на кухина вътрепръст леко наруши стабилността на захвата. Учените планират да усъвършенстват дизайна на своето устройство, за да коригират този недостатък. Освен това те планират да разработят дръжка с три пръста, която може например да събира парчета плодове и да оценява тяхната зрялост.
Прочетете още:
MIT създава стационарен топлинен двигател, който превъзхожда турбините
След десет години работа учените поставиха под въпрос стандартния модел на физиката
Вижте как изглежда изгревът на Марс