Какво представляват меките роботи?
Меката роботика е специална област на роботиката, която се занимава с
Меката роботика зависи до голяма степен откак живите организми се движат и адаптират към средата си. За разлика от роботите, изградени от твърди материали, меките роботи осигуряват повишена гъвкавост и адаптивност за изпълнение на задачи, както и повишена безопасност при работа с хора. Тези характеристики му позволяват да се използва в медицината и индустрията.
Меката роботика основно проектирароботи, направени изцяло от меки материали. В резултат получените роботи изглеждат като безгръбначни като червеи или октоподи. Симулирането на движението на такива роботи е трудна задача. Факт е, че за такива процеси е необходимо да се прилагат методите на механиката на континуума. Ето защо меките роботи понякога се наричат непрекъснати роботи.
Механиката на континуума е клон на механиката, физиката на континуума и физиката на кондензираната материя, посветен на движението на газообразни, течни и деформируеми твърди вещества, както и на силовите взаимодействия в такива тела.
Хибриди на меки и твърди роботи
За да изучават биологични явления, учените създават меки роботи по образа на живите организми и провеждат експерименти, които са трудни за изпълнение върху реални организми.
Има обаче твърди роботи, които също са способни на непрекъсната деформация, като например змийския робот.
Меките конструкции могат да се използват като част отпо-голям твърд робот. Роботите меки ефектори за захващане и манипулиране на предмети осигуряват предимство. Въпросът е, че те не унищожават крехки предмети.
Също така е възможно да се създаде хибриден мек твърдроботи, които имат вътрешна твърда рамка и външни меки елементи. Меките елементи могат да имат много функции: както действащи механизми, подобни на животинските мускули, така и амортизиращ материал, за да се гарантира безопасността в случай на сблъсък с хора.
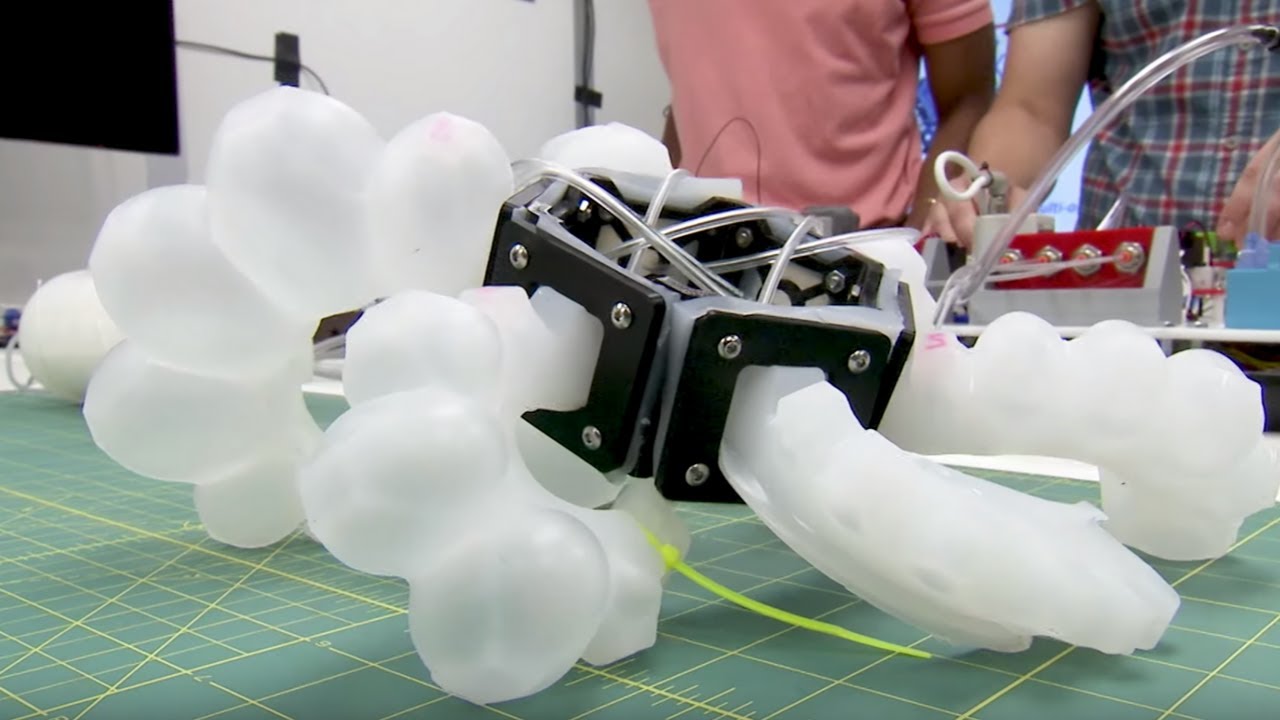
 Робот на колела с меки крака и способността да се движи по земята.
Робот на колела с меки крака и способността да се движи по земята.
Снимка: Али Садеги, Алесио Мондини, Емануела Дел Доторе, Ананд Кумар Мишра и Барбара Мацолай
Меките роботи могат да бъдат огънати във всякаква формаформа. Изработени са от много мек материал, включително наноматериали. Това ги прави по-скоро като части от човешкото тяло, като мускули. Всъщност може да се каже, че тези роботи почти оживяват с помощта на наноматериали.
Въпреки многото изследвания в областта на меките роботи, инженерите все още са в самото начало на своя път. Експертите обаче прогнозират, че до 2024 г. пазарът им ще достигне 2,16 млрд. долара.
По какво се различават меките роботи от обикновените роботи?
Металните роботи са много по-ограничени. Те са създадени с мисъл за бързина и прецизност, което ги прави идеални за неща като работа на поточната линия. Но те не са толкова универсални.
Меките роботи се различават от индустриалните илисъвместни роботи, тъй като тяхната конструкция е направена от меки, гъвкави материали. Техният дизайн е много различен от всяка друга форма на роботи и също толкова меките роботи изпълняват много различни функции.
Повечето меки роботи все още са вътрев ранните етапи на развитие и първият мек робот е разработен през 2011 г. от професора от Харвард Джордж Уайтсайдс. Оттогава броят и видовете меки роботи се увеличиха драстично. Въпреки че може да са на няколко години от действителната си търговска жизнеспособност, те все още представляват вълнуваща технология с голям потенциал.
Меки роботи - вълнуваща иновация в светароботика. Горните пет вида меки роботи могат да имат най-големия търговски потенциал от всички видове меки роботи, които се разработват в момента.
За разлика от индустриалните или съвместните роботи, меките роботи обслужват голямо разнообразие от приложения.
Как се използват меките роботи?
Привлекателността на меките роботи се крие в тяхната гъвкавост и гъвкавост.
6 обещаващи вида меки роботи
Има много различни видове меки роботи, но има 6 различни приложения, които обещават най-голям търговски потенциал.
- Роботизирани мускули: в момента се разработват няколко видамеки роботи, които ще действат като роботизирани мускули. Един от най-обещаващите прототипи се вдъхновява от оригами. Неговата сгъната структура може да повдигне 1000 пъти собственото си тегло и да е с дължина от няколко милиметра до метър. Освен това учените сега работят върху създаването на наномащабни роботи от ДНК.
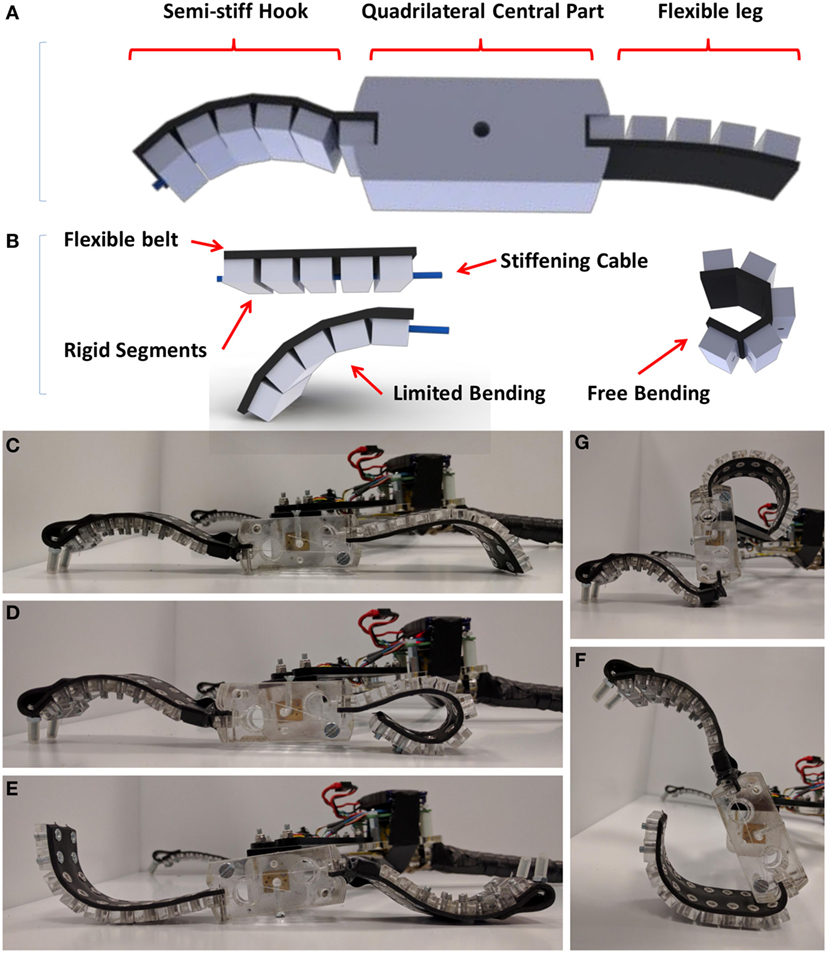
- Роботи за катерене:тези видове роботи имат много потенциалприложения, вариращи от инспекция и поддръжка на сгради до операции за търсене и спасяване. Една версия на меките роботи за катерене има извит дизайн, много подобен на гъсеница. Това му позволява да пълзи нагоре и надолу по структури с различни размери.
- Ядливи роботи. Първият проект на такива роботи създаден от училищния екип във Филаделфия за ежегодното състезание по мека роботика. Тези биоразградими роботи могат безопасно да доставят лекарства до различни части на тялото.
- Носими роботи.Тези биомиметични устройства могат да помогнатпациент, подложен на физическа рехабилитация. Мекият робот имитира естественото движение на тялото, където и да се намира, помагайки на пациента да си възвърне нормалната двигателна функция.
- Протезни роботи.За създаване могат да се използват меки роботипревъзходни протези за хора, на които липсват крайници или части от тялото. Често технологията на меката роботика се използва в края на протезната ръка за по-деликатно и прецизно хващане на предмети.
- Роботи-астронавти. Учени от НАСА предполагат, че един ден ще летят на повърхността на Марс. Други вече проектират роботи, които ще работят в най-труднодостъпните части на човешкото тяло.
Въпреки че меките роботи могат да се използват и виндустриална среда - особено като съвместни роботи (известни също като „коботи“), работещи с хора, те едва ли се ограничават до това.
Първият в света мек автономен робот
През 2016 г. учени от Харвард използвахатечна силиконова гума за разработването на Octobot, първият в света мек автономен робот. Вдъхновени от октоподите, тези меки роботи могат да се въртят и да преодоляват препятствия, които може да не са възможни за остри, твърди метални роботи като тези, изобразени в "Терминаторът" или "Междузвездни войни".
Изненадващо, Octobot е по-евтин за производство,отколкото лате и струва само 5 цента за зареждането му. Човек може да си представи стотици евтини меки роботи, изпратени да разследват местопроизшествието, да преодолеят препятствията и тесните места, за да помогнат в спасителната операция.
„Основната цел на меката роботика не е да създаваултра прецизни машини, защото вече ги имаме “, каза биомедицинският инженер Жада Гербони в своята TED през 2018 г. "И за да направят роботите способни да издържат на неочаквани ситуации в реалния свят."
Меки роботи в медицината
Меките роботи могат да се използват катохирургически и медицински инструменти (по-специално ендоскопи). Тяхното предимство е, че те се движат през структурите на тялото по-лесно, отколкото традиционните инструменти могат. Това дава на лекарите по-ясна картина на областта на тялото на пациента, която те искат да изследват.
Напълно мекото роботизирано облекло, което може да помогне на хората да се движат, е една крачка по-близо до реалността с разработването на нова гъвкава и лека система за захранване за мека роботика.
Откритие, направено от екип от БристолУниверситет, може да проправи пътя за носими помощни устройства за хора с увреждания и тези, страдащи от свързана с възрастта мускулна дегенерация. Проучването е публикувано днес вНаучна роботика,
 Нова тънка и лека помпа с размер на кредитна карта. Кредит: Тим Хелпс, Университет в Бристол.
Нова тънка и лека помпа с размер на кредитна карта. Кредит: Тим Хелпс, Университет в Бристол.
Меките роботи са изработени от гъвкави материали,които могат да се разтягат и извиват. Тези материали могат да се използват за създаване на изкуствени мускули, които се свиват, когато въздухът се изпомпва в тях. Мекотата на тези мускули позволява използването на поддържащо облекло. Досега обаче тези пневматични изкуствени мускули са били задвижвани от конвенционални електромагнитни (моторни) помпи, които са обемисти, шумни, сложни и скъпи.
Изследователи от Bristol SoftLabи лабораторията по роботика в Бристол, водена от професор по роботика Джонатан Роситър, успешно демонстрираха нова електро-пневматична помпа, която е мека, гъвкава, евтина и лесна за производство.
В статията екипът описва как новата мекаПомпа с размер на кредитна карта може да управлява изкуствени мускули с въздушен мехур и да изпомпва течности. Екипът също така очертава следващите си стъпки, за да превърне мощното облекло в реалност.
По същия начин титаниевите полимери на основата на въглеродможе да се използва в комбинация със синтетични полимери за създаване на ултратънки изкуствени мускули. Тази технология е демонстрирана в репродукции на танцуващи пеперуди, пърхащи листа и цъфтящи цветя в Корейския институт за наука и технологии.
Как работят меките роботи?
Меки роботи, специално проектирани заимитации на живот, често трябва да бъдат подложени на цикличен стрес, когато се движат или изпълняват други задачи. Например, в случай на минога или подобен на сепия робот, описан по-горе, ще се наложи електролиза на вода и запалване на газ, за да се движи, което води до бързо разширяване, за да задвижи робота напред. Това повтарящо се и експлозивно разширение и свиване ще създаде интензивно циклично натоварване на избрания полимерен материал. Робот под вода в Европа би било почти невъзможно да се поправи или замени, така че трябва да се внимава да се избере материал и дизайн, който минимизира появата и разпространението на уморени пукнатини. По-специално трябва да се избере материал с граница на издръжливост или честота на амплитуда на напрежение, над която характеристиката на умора на полимера вече не зависи от честотата.
Тъй като меките роботи са направени от мекиматериали, трябва да се вземат предвид температурните ефекти. Напрежението на границата на текучест на материала има тенденция да намалява с температурата, а при полимерните материали този ефект е още по-изразен. При стайна и по-висока температура дълги вериги в много полимери могат да се разтягат и плъзгат една по друга, предотвратявайки локалната концентрация на напрежение в една зона и правейки материала пластмаса. Но повечето полимери се подлагат на пластична до крехка температура на преход, под която няма достатъчно топлинна енергия, за да реагират дългите вериги по този пластичен начин и разрушаването е много по-вероятно. Счита се, че тенденцията полимерните материали да стават чупливи при по-ниски температури е причината за катастрофата на совалката Challenger и трябва да се приема много сериозно, особено за меките роботи, които ще бъдат въведени в медицината. Пластичната до крехка температура на преход не трябва да бъде това, което може да се счита за "студено" и всъщност е характеристика на самия материал, в зависимост от неговата кристалност, жилавост, размер на страничната група (в случая на полимери) и други фактори.
Недостатъци на технологията
Меките роботи не са лишени от своите недостатъци.По-конкретно, учените откриха, че флуидните задвижващи механизми – устройствата, които всъщност анимират роботи – се включват бавно поради огромното количество течност, необходима за движение, или защото потокът им се забавя от различни структури в устройството (като тръби и клапани ).
Изследователите от Харвард обаче се развиватзаобиколно решение. Отбелязвайки, че огъването на такива играчки освобождава много енергия, те проектират изпълнителни механизми с два плъзгащи се капака, един в друг. Когато външната капачка се надуе, налягането се увеличава върху вътрешната капачка. Когато се огъне, освобождаването на енергия задвижва устройството.
Меките роботи имат потенциал за товасе простира до Марс и обратно и те несъмнено ще станат голяма част от обществото през следващите години. Техните възможности са ограничени само от човешкото въображение.
Меки роботи и хора
Роботите с меко тяло предлагат възможност засоциални и тактилни взаимодействия между хора и роботи, които изискват внимателно разглеждане на възможността за неподходящи емоционални привързаности и лично и социално разрушително поведение на потребителите. Етичните въпроси, свързани с взаимодействието човек-робот и как те трябва да допринесат за дизайна на меката роботика в контекста на социалното взаимодействие, са обсъдени в статия за списание Soft Robotics.
Томас Арнолд и Матиас Шойц, Университет Туфтс,Медфорд, Масачузетс, е съавтор на статия, озаглавена „Тактилната етика на меката роботика: интелигентен дизайн за взаимодействие между човек и робот“. Те изследват широк спектър от теми, включително способността на меките роботи да се докосват и взаимодействат със заобикалящата ги среда, потенциалните рискове от формирането на еднопосочни емоционални връзки на човека с роботите и за какво трябва да бъдат проектирани социалните роботи. За да илюстрират някои от етичните проблеми, свързани с меката роботика и потенциалните рискове за обществото, авторите обсъждат примера на секс роботи.
Арнолд и Шойц предлагат три общипринципът за развитие на меката роботика в контекста на социален човек и робот. Те насърчават общността на меката роботика да се справи с тези етични проблеми като начин за подобряване на качеството и ефективността на взаимодействието човек-робот. „Технологията с меки роботи скоро ще ни донесе машини, които директно взаимодействат с хората; важно е да започнем да мислим за въздействието, което те могат да окажат върху социалните ситуации. Този документ очертава някои от ключовите въпроси и предоставя отлични насоки за сериозно обсъждане на взаимоотношенията човек-робот ”, заключава д-р Бари А. Тример, който ръководи лабораторията по невромеханика и биомиметични устройства в университета Туфтс в Медфорд, Масачузетс .
Прочетете също
Създадена е първата точна карта на света. Какво не е наред с всички останали?
Погледнете снимките на планети с мъглявини Хъбъл.
Физиците са създали аналог на черна дупка и са потвърдили теорията на Хокинг. Къде води?