Кои са роботите?
Преди няколко години в Reddit се появи страхотно нещо - учените описаха комплекс
Роботиката е синергично приложениесфера на дейност. Състои се от програмиране, мехатроника и кибернетика. Мехатрониката е нещо, което взаимодейства с реалния свят. А кибернетиката е многозвенна наука, която включва преди всичко управлението на създадените програми.
Какво е робот?Преди 15 години мнозина биха казали, че това е роботизирана ръка, която работи във фабрика и заварява или боядисва. Друг популярен отговор е роботът android от света на киното. Но дали движеща се количка или безпилотно превозно средство е робот? Да, това също е една от областите на роботиката. Самолетите също са роботи, някои от най-новите разработки включват интелигентни технологии и всъщност са автономни роботи.
 Мобилната количка също е робот
Мобилната количка също е робот
Има и такава област на роботиката като полероботика - "мобилна роботика". Това включва всички роботи, които се движат в поле, сграда или под вода. Най-интересното приложение според мен е селското стопанство.
История на самолетите
Историята на самолетите започва в миналотовек. Преди това летяха само балони без двигател и беше трудно да ги наречем роботи. В началото на миналия век са функционирали два вида летателни апарати - дирижабли и самолети. Първият контролиран полет е направен от братята Райт. Освен това първият автопилот се появи доста бързо, почти 10 години след това, той помогна да се стабилизира полета.
Сегашното направление на роботиката е свързано сразработване и наличие на нови отворени автопилоти като PixHawk (PixHawk е отворен хардуер за контролери, дронове и други UAV. Използва се за академични, любителски и професионални цели). Пример за пристигането на дронове в живота на всеки човек е доставката на пица от компанията Dodo Pizza съвместно с Copt Express - това се случи през 2014 г.
 История на самолетите
История на самолетите
Как се управлява дронът
Съвременните самолети използват такъвот трите принципа на създаване на подемна сила - аеростатичен, реактивен или аеродинамичен. Аеродинамичният принцип на полета и създаването на повдигане (изхвърляне на част от въздуха) може да се реализира или поради движението на целия апарат, оборудван с неподвижна опорна повърхност (крило), или поради движението на отделни носещи части на апарата (главен ротор, вентилатор) спрямо въздуха.
 Как летят устройствата
Как летят устройствата
Дронът има витло, което създава подемна сила.След като се отлепи от земята, устройството започва да движи витлото по-бързо и се издига нагоре. Но силата на действие е равна на силата на реакцията. Когато витлото се върти, се създава момент в другата посока - това е конструкцията на хеликоптерите и хеликоптерите. Ако хеликоптерът има едно витло, той няма да е стабилен. Следователно устройството използва или двуроторна схема, или опашен ротор.
Квадрокоптерът има много прост дизайн -Обикновено има четири винта, два от които се въртят в едната посока и два в другата посока. Ако потребителят трябва да се придвижи напред, някои витла се въртят по-бавно, докато други по-бързо. И ако потребителят иска да завие, тогава някои винтове, поставени диагонално, ускоряват, докато други забавят.
 Как лети квадрокоптер
Как лети квадрокоптер
Движенията на хеликоптера в ъглите са свързани с движението по дължинатакоординати. Ако пилотът иска да се движи напред, трябва първо да наклоним дрона напред и след това, докато електрическото устройство се дърпа напред, да го стабилизираме в точката, в която искаме да останем.
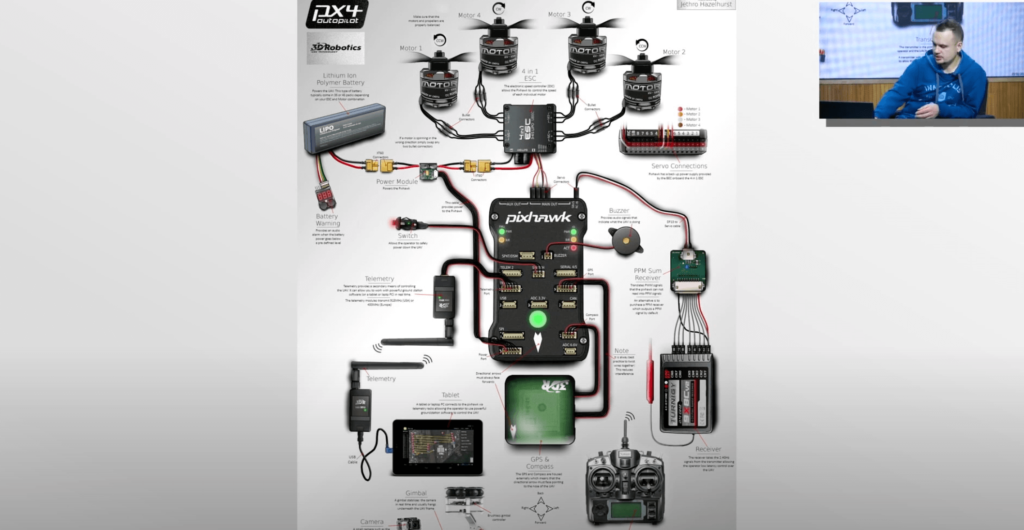
Това е диаграма на един от най-популярните автопилоти,на базата на които могат да се правят нови устройства. Свързва се с всички двигатели и сензори. Освен това двигателите имат собствен блок за управление, ESC регулатор - Electronic Speed Controller, който контролира скоростта на двигателя.
От сензорите има GPS, за да може дронаработете на открито, летете до точки и стабилизирайте позиция. Но вътре в самия автопилот има и IMU - инерционен сензорен модул, който му позволява да определя ъглите на ориентация. Има и канал за връзка, наземна станция за управление и батарея.
 UAV устройство
UAV устройство
Както бе споменато по-горе, има нивоуправление на двигателя - ние, без колебание, можем да зададем скоростта на въртене. Останалите нива работят на същия принцип: следващото е контрол на ориентацията.
Но първо трябва да контролираме скоростта на въртене- FPV коптери летят на това ниво (устройства, които ви позволяват да гледате картината от камерата на дрона в реално време от първо лице (FPV - First Person View). Опитните пилоти задават скоростта на въртене и постоянно управляват с джойстика. Следващият етапът е, когато потребителят може да стабилизира ъгъла, но дронът все още ще се движи. Следва контрол на скоростта, а най-високият е позиционен контрол, маневри за придвижване до точка или движение по дадена траектория.
Тези, които искат да програмират, изграждат иуправлявайте дронове - трябва да обърнете внимание на автопилота с отворен код PIX4. Има цяла общност около въздушната роботика (ROS - robotic operating system, или Open robotics), има симулатори за дронове. Следователно много експерименти могат да се правят в симулатора, без да разполагате със самия дрон.
Етапи на развитие на дрона
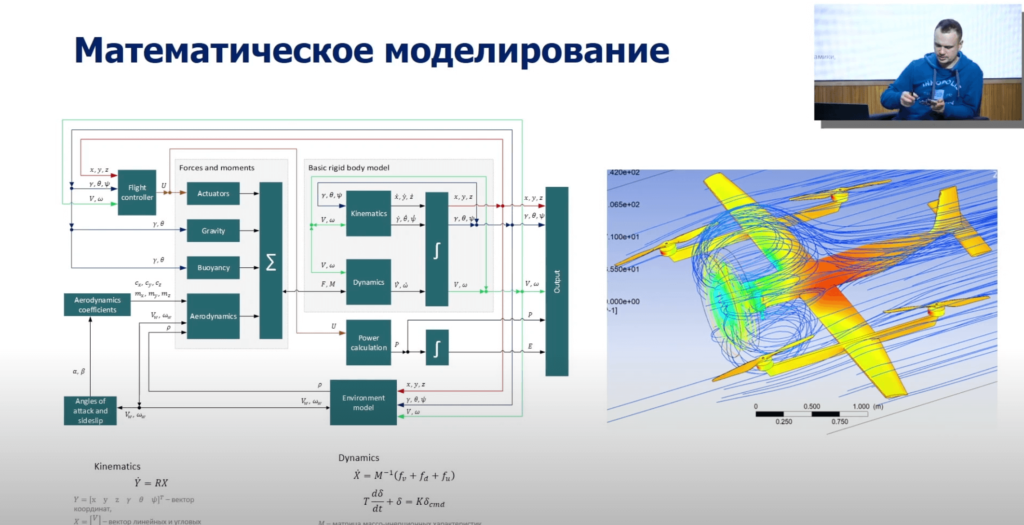
Изследователите започват с концептуалномоделиране и след това те трябва да изградят точен модел на апарата. Без да навлизаме във формулата, моделът на хеликоптер е по същество модел с твърдо тяло. Това е вторият закон на Нютон, разширен към системи от частици. Има постъпателно и въртеливо движение, има кинематика и динамика на движението и за да опишем модела на конкретно устройство, тук трябва да добавим уравнението на силите, действащи върху конкретен дрон.
 Как се моделират UAV
Как се моделират UAV
Следващата стъпка е разработването на систематауправление. Ако тръгнем по класическия начин: първо откриваме точния математически модел и на негова основа вече синтезираме алгоритъма за управление или нови формули. Всички нива могат да бъдат включени в системата за управление: планиране на движението, възприемане на околната среда, оценка на състоянието с помощта на сензори. Алгоритмите ни позволяват да прецизираме нашите координати и данни.
 Система за управление на дрона
Система за управление на дрона
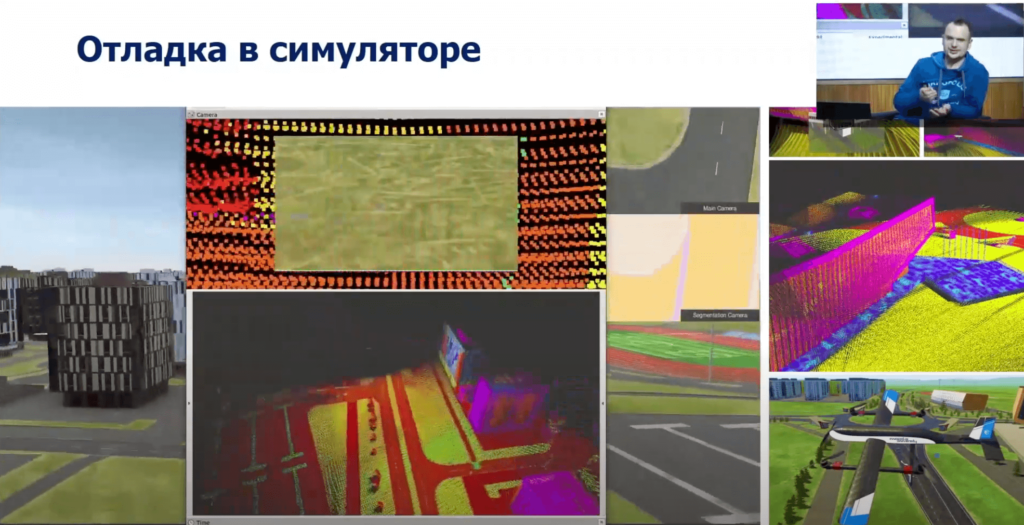
Когато има алгоритъм за управление, може и веднагакандидатствайте, но това е доста скъпо. Устройствата забиват при най-малката грешка - това трябва да се вземе предвид и да се правят резервни копия. За тестване се използват симулатори.
По-долу е виртуална обиколка на Innopolisе продукт на нашия университет, достъпен е за изтегляне от GitHub. Това не е само визуален компонент, но и данните от всички сензори на устройството. Има всички сензори за позиция, управлява се като дрон и може да дебъгва всички алгоритми за управление.
 Как дроновете се учат в симулация
Как дроновете се учат в симулация
Когато въз основа на опита със симулатора се появяваповече увереност - можете да преминете към хардуерно изпълнение. Тук са показани неговите компоненти: производството на устройството от карбон и композит, създаването на електроника, поставянето на двигатели, тяхното закрепване.
Тестовете не започват на улицата:Първо, устройствата се тестват на окачване или специален стенд. Те могат да се използват за отстраняване на грешки в елементи от функционирането на безпилотен летателен апарат. Например, тук е показан самолет с вертикално излитане и кацане - това е хибрид на хеликоптер и самолет, във видеото можете да видите как се справя с външни смущения и поддържа ъгъл. Вдясно е доста луд експеримент, при който запалвате пет двигателя наведнъж и виждате как системата за управление се справя с него.
 Как се изграждат дроновете
Как се изграждат дроновете
След тестване те преминават към полети -малки излитания при ниски скорости, контролирано движение с пилот, който може да поеме контрола. Последният акорд е напълно безпилотен полет.
Устройството излита вертикално -„като хеликоптер“, тогава основният му двигател се включва, дронът ускорява, превключва на самолетен режим и развива достатъчна скорост, за да може крилото да работи. След това контурните витла се изключват и той лети като самолет - процесът на кацане се извършва в обратен ред.
Какво става с дроновете
Една от задачите, които съвременнитеучени — заобикаляне на препятствия по време на полет. Някои дронове вече знаят как да направят това, но задачата е малко по-широка - трябва да научите устройствата да се движат възможно най-бързо в среда с препятствия. И все още има какво да се стремим и подобряваме алгоритмите.
Друг пример за такова тестване е полет догора. Има много интересен подход - тук се използват не само нови алгоритми, но и сензори - камера за събития. Това е камера с много висока честота, която предава разликата между кадрите във всяка единица време: това ви позволява бързо да контролирате и реагирате на препятствия.
В областта на планирането на движението на дронове,състезание: кой ще го направи по-бързо. Задачата е да се картографира непозната местност, да се изгради нейното триизмерно представяне, да се намерят обекти върху нея. Летяхме в университета, но също така решихме проблема с намирането на предмети. Нашите резултати бяха дори по-добри от известните публикувани алгоритми.
Има състезания в надпреварата с дронове.Правят се на апарати с камера, когато пилотът е с очила и управлява дрона да прелети максимално бързо през вратата. Доста зрелищно събитие, при което същата задача трябва да се изпълнява в автоматичен режим. За съжаление досега компютърът е успял да победи човек само в шах, а роботът-дрон не е успял да изпревари човешки пилот, въпреки че прогресът вече е доста сериозен. Дрон с помощта на алгоритъм за машинно зрение може да изпълнява такива задачи, работата е само за увеличаване на скоростта.
Друго състезание е Microsoft Games ofдронове, то се извършва в симулатор. В същия район се провежда едно от най-известните водещи състезания в Саудитска Арабия. Участниците там се набират за три години предварително.
За шоута с дронове се използват безпилотни устройства- Това са грандиозни събития, които днес са се превърнали в заместител на фойерверките. Но това не е единственото групово използване - те могат да инспектират по-голяма площ.
Къде се прилага
За да не изглежда като изключително наученразработка, по-долу е демонстрация на дрона Skydio. Сега това е най-модерното устройство по отношение на автономността. Това е пример за това как съвременните технологии - картография, избягване на препятствия, планиране на трафика се използват заедно в един вече достъпен за потребителя продукт.
Друга посока са новите дизайнисамолет. Един от тях са сгъваемите дронове. Едно такова устройство може да лети в тесни пространства за проверка след инцидент. Друг пример е дрон, който може да се разгъва. Например, той може да излети от тясна пневматична тръба и след това да лети както обикновено.
Ние също имаме проект в тази област - това емек Tensodrone. Това е първият дрон с мека черупка, който лети. Удоволствието е, че можете да го изпуснете и той ще остане непокътнат. Освен това можете да промените дължината на гредите, напрежението на кабелите.
Два примера, които ще оживеят вскоро. Първо, доставка с помощта на дронове. Сега има много интересна реализация, при която комбинираме терминал за колети и станция за кацане на дронове - в този случай не е нужно да се тревожим кога ще пристигне дронът, къде ще кацне, за да можем да стигнем до него време и вземете товара, преди да бъде откраднат. Вторият пример е летящо такси. Това е най-вълнуващата област на разработка и вече има работещи прототипи. Но това ще се случи едва през следващото десетилетие.
Какви разработки в областта на летящите таксита се появиха през последните 6 години:
- Компанията "Ховър" представи устройство снискошумен електродвигател и компактни размери - като на автомобил. Излита на 150 м височина и каца на стандартно паркомясто. Дронът е предназначен за двама пътници, максималният полезен товар е 300 кг, а скоростта е 200 км/ч.
— През 2016 г. руската компания Hoversurfпоказа ховърбайк, който можете да носите със себе си и да свалите по всяко време от обикновен градски паркинг. Развива скорост до 100 км/ч, а височината на повдигане е принудително ограничена до 5 метра от съображения за безопасност.
— През 2018 г., разработен от пътнически AirbusСамолет Alpha One VTOL се изкачи на височина от 5 метра и остана във въздуха 53 секунди. Потребителят ще може да извика UAV чрез приложението и да стигне от една точка до друга както в града, така и извън него.
— През 2020 г. създаде въздушно такси CityAirbusпървият безплатен полет. Тестването се проведе в предградието на Париж, град Ил дьо Франс.Самолетът CityAirbus може да се движи със скорост до 120 км/ч на разстояние до 30 км. Теглото на летящото такси е повече от 2,2 тона, CityAirbus е оборудван с три пътнически места и една шофьорска.
- През 2022 г. китайският стартъп Pantuo Aviation представи T1, демонстратор на летящо такси с въздуховод. Той ще лети със скорост над 300 км/ч и ще има обсег от 250 км.
Прочетете още:
Космическата сонда прелетя на 200 км от Меркурий. Вижте какво видя
Учените разкриват как витамините влияят на честотата на рака
Китайският шлем за четене на мисли звучи алармата, когато човек види порно съдържание