Inženýři z University of Cambridge vyvinuli měkkou robotickou ruku s potiskem
Výzkumníci použili tištěnéAntropomorfní ruka implantovaná hmatovými senzory do 3D tiskárny, aby ruka mohla „cítit“, čeho se dotýká. Ruka byla schopna pasivního pohybu pouze na základě zápěstí. „Velkou výhodou tohoto designu je rozsah pohybu, který můžeme získat bez použití jakýchkoli ovladačů,“ říkají autoři.
Výcvik „pasivní“ robotické paže. Video: University of Cambridge
Vědci provedli více než 1200 testů s robotickým ramenem,sledoval její schopnost uchopit malé předměty, aniž by je upustil. Zpočátku byl robot trénován pomocí malých 3D tištěných plastových kuliček a uchopoval je pomocí předem určených akcí odvozených z lidských demonstrací.
Robot k tomu používal pokusy a omylyzjistit, které zachycení bude úspěšné. Po ukončení cvičení s míčem se pokusil uchopit různé předměty, včetně broskve, počítačové myši a role bublinkové fólie. V těchto testech byla ruka schopna úspěšně uchopit 11 ze 14 předmětů.
Snímání objektů různých velikostí, tvarů a textur- úkol jednoduchý pro člověka, ale obtížný pro robota. Většina dnešních vyspělých robotů není schopna provádět manipulační úkony, které by malé děti snadno zvládly. Lidé například instinktivně vědí, jakou sílu je třeba vyvinout, aby zvedli vejce, ale pro robota je to problém: pokud není dostatečně silný, předmět spadne, příliš silný rozbije vejce.
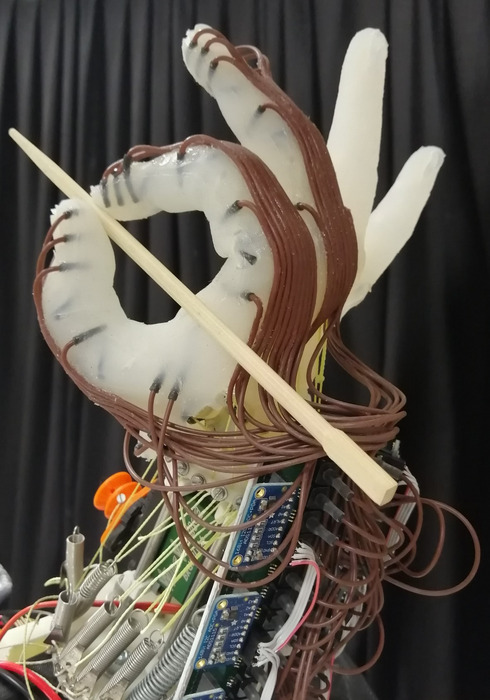 Prototyp robotického chapadla. Obrázek: University of Cambridge
Prototyp robotického chapadla. Obrázek: University of Cambridge
Sofistikovaná technologie s motorizovanými prstyvyžaduje značné množství energie a velký počet složitých a drahých pohonů pro každý kloub. Díky pasivnímu uchopení navrženému inženýry je robot mnohem snadněji ovladatelný a energeticky úspornější. Vědci se domnívají, že jejich adaptabilní design by mohl být použit k vývoji levné robotiky schopné přirozenějších pohybů.
Přečtěte si více:
Podívejte se na mapu Marsu v nejvyšším rozlišení: 110 000 snímků a 5,7 bilionu pixelů
"Moře" kvarků uvnitř jednoho protonu: z čeho se skládá elementární částice
Nový snímek Hubblea zmátl vědce
Na obálce: prototyp robotického chapadla. Obrázek: University of Cambridge