Inženýři z École Polytechnique Fédérale de Lausanne vyvinuli metodu, která robotům umožňuje
Přistání ornitoptéry. Video: EPFL
Přistání ptáka na větvi se zdá být jedním z nejvícepřírodní procesy. Ale ve skutečnosti to vyžaduje extrémně přesnou rovnováhu mezi časem, silou nárazu, rychlostí a přesností pohybu, poznamenávají autoři vývoje. Není divu, že až dosud nebyli inženýři schopni tyto pohyby v robotech reprodukovat.
 Přistávací systém ornitoptéry. Obrázek: Raphael Zufferey a kol., Nature Communications
Přistávací systém ornitoptéry. Obrázek: Raphael Zufferey a kol., Nature Communications
Výzkumníci vyřešili problém přesného vyváženívybavení ornitoptéry palubním počítačem a navigačním systémem. K zachycení pohybu a určení polohy zařízení využívá externí zdroje. Přívěsek drápové nohy ornitoptéry byl přesně zkalibrován, aby kompenzoval vibrace nahoru a dolů během letu, když se dron pokoušel chytit bidlo.

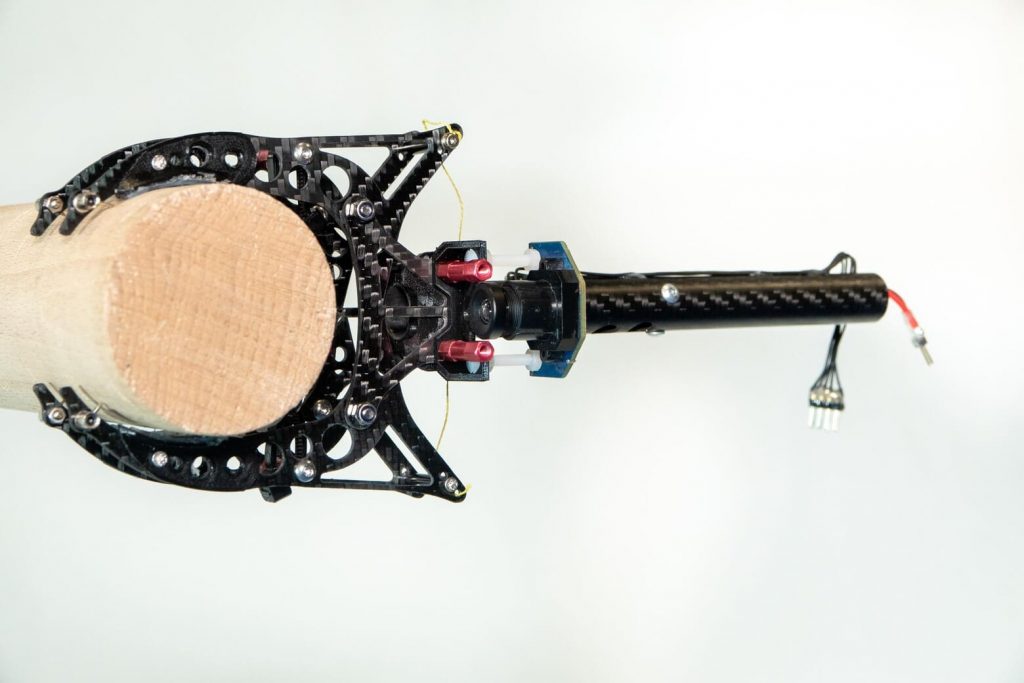
Držák na ornitoptéru. Obrázek: EPFL
Samotný dráp byl navržen tak, abyabsorbovat hybnost pohybu robota při nárazu a rychle a bezpečně se zavřít, aby unesla jeho váhu. Jakmile je robot na bidýlku, zůstane na bidýlku bez vynaložení energie. Vědci v současné době provádějí letové testy v laboratoři.
Jakmile se ornitoptéra naučí samapřistát na větvi stromu, bude schopen vykonávat určité úkoly, jako je nenápadný sběr biologických vzorků nebo měření ze stromu. Nakonec by mohl dokonce přistát na umělých strukturách, což by mohlo otevřít nové využití.
Raphael Zufferey, spoluautor vývoje
Přečtěte si více:
Nedaleko od Země byly nalezeny dvě planety. Možná jsou obydlené
Unikátní meteor přepsal historii sluneční soustavy: odkud se vzal
Prototyp modulu nové ISS byl vyhozen do povětří v centru NASA. Podívejte se, jaké to bylo