Využili výzkumníci z University of Illinois v Urbana-Champaign a Princeton University
Vědci použili malou spirálkuaktuátory, které napodobují práci svalů v hrudníku cvakavého brouka. Umělý aktuátor táhne za malý paprsek, což způsobuje, že se robot pomalu ohýbá a ukládá elastickou energii. Po uvolnění tato energie tlačí robota nahoru.
V předchozích studiích to vědci zjistilibrouk klik má speciální spirálový sval. Ukládá energii a spustí se například při převalení hmyzu na záda. Při prudkém napřímení tohoto svalu se tělo brouka vrhne do velké výšky, několikanásobně větší než je jeho velikost. Stejný mechanismus funguje u robotů.
Jednou z hlavních výzev malé robotiky je najít design, který je malý, ale dostatečně výkonný, aby překonal překážky nebo rychle opustil nebezpečná místa.
Sameh Tawfiq, vedoucí výzkumu
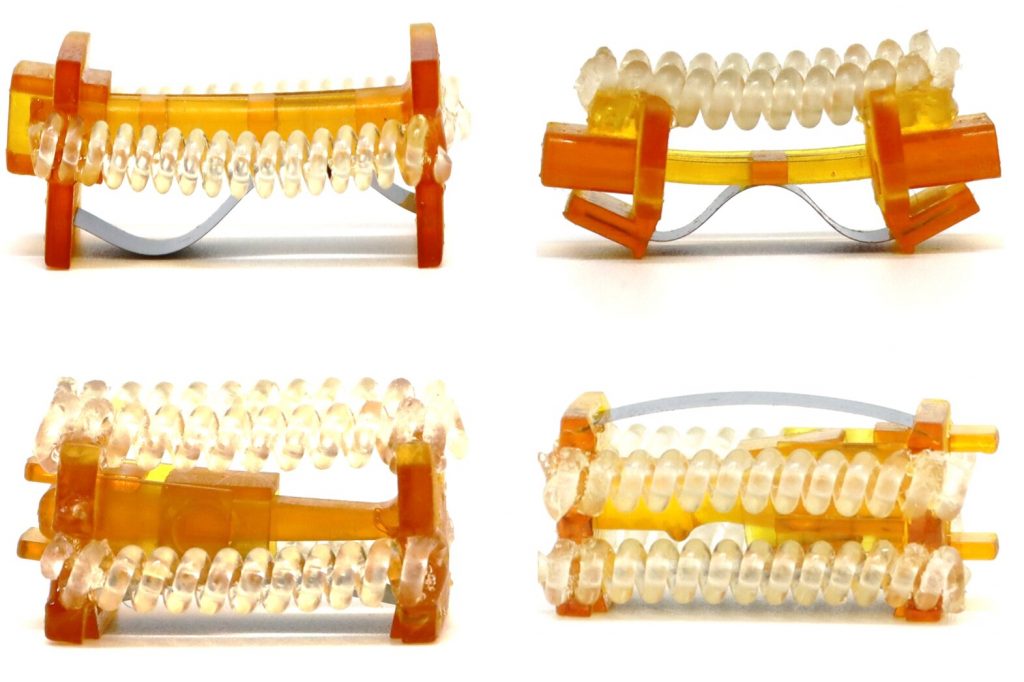 Varianty návrhů skákacích robotů navržené výzkumníky. Obrázek: University of Illinois Urbana-Champaign
Varianty návrhů skákacích robotů navržené výzkumníky. Obrázek: University of Illinois Urbana-Champaign
Vědci věří, že drobní roboti anodostat se do těžko přístupných míst, kde pomáhat při údržbě velkých strojů, jako jsou turbíny a proudové motory, nebo v zemědělství při kontrolách závodů, jako je fotografování k identifikaci problémů.
Přečtěte si více:
Obrovská sluneční skvrna se obrací k Zemi. Je vidět pouhým okem
Podívejte se, jak letí letadlo bez čepele. Jeho rychlost přesahuje 900 km/h
Mléčná dráha je na své galaktické vlákno abnormálně velká
Na obálce: umělecká ilustrace myšlenky. Obrázek: Michael Vincent, University of Illinois Urbana-Champaign