Nedávno vědci provedli studii zaměřenou na replikaci lidské schopnosti určovat
Článek zdůrazňuje výhody vývoje robotů, kteří mohou komunikovat s prostředím prostřednictvím dotyku, nejen vidění a zpracování zvuku.
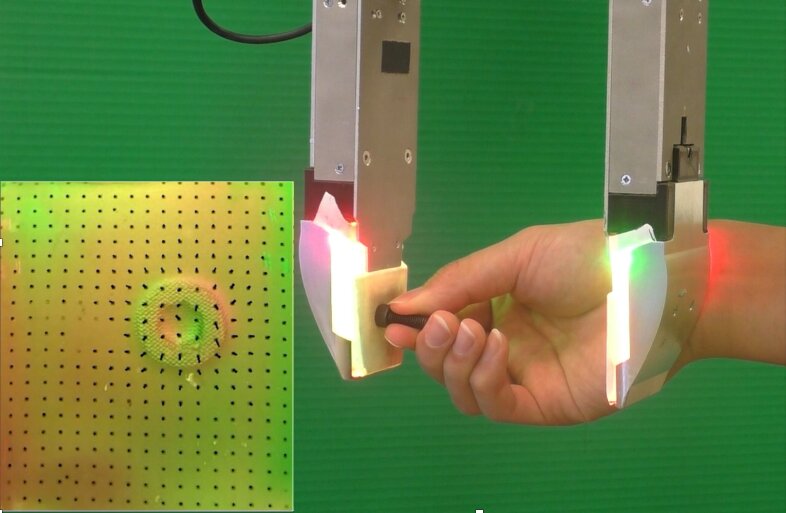
Cílem naší práce bylo demonstrovat to pomocíDíky hmatovému snímání s vysokým rozlišením lze známé objekty přesně lokalizovat již při prvním kontaktu. To je důležitý pokrok oproti předchozí práci na hmatové lokalizaci, protože se nespoléháme na žádné jiné způsoby vnějšího vnímání (např. vidění) nebo dříve shromážděná hmatová data spojená s manipulovanými objekty.
Maria Bauza, jedna z badatelek
Nová technika se učí ze simulace a nevyžaduje rozsáhlý sběr dat. Zpočátku vědci vyvinuli strukturu, která simuluje kontakty mezi daným objektem a hmatovým senzorem, za předpokladu, že robot má přístup k datům o objektu, se kterým interaguje (například o jeho trojrozměrném tvaru, vlastnostech atd.) .
Dále výzkumníci použili modernímetody strojového učení pro počítačové vidění a učení reprezentace, aby odpovídaly skutečným hmatovým pozorováním shromážděným robotem se sadou kontaktů generovaných procesem simulace.
V podstatě metoda vyvinutá touto skupinouvýzkumníci mohou modelovat kontaktní informace jednoduše na základě trojrozměrného tvaru objektu. V důsledku toho nejsou vyžadována žádná předběžná hmatová data shromážděná pečlivým studiem objektu. To této technice umožňuje generovat odhady pozice pro objekt z prvního dotyku hmatových senzorů robota.
Přečtěte si více
Země dosáhne kritické teploty za 20 let
Potrat a věda: co se stane s dětmi, které porodí
Byla pojmenována rostlina, která se nebojí změny klimatu. Živí miliardu lidí