Metoda učení navržená robotiky umožňuje robotovi, aby se autonomně naučil provádět plavecké manévry.
„V naší studii jsme prezentovalimetoda řízení učení biologického posilování pro simulaci pohybu podvodních robotů,“ řekl Gang Chen, jeden z autorů vývoje. „Tato metoda je založena na jedné z našich předchozích prací o pohybu bobrů, publikované v časopise Springer Link’s Journal of Intelligent & Robotické systémy".
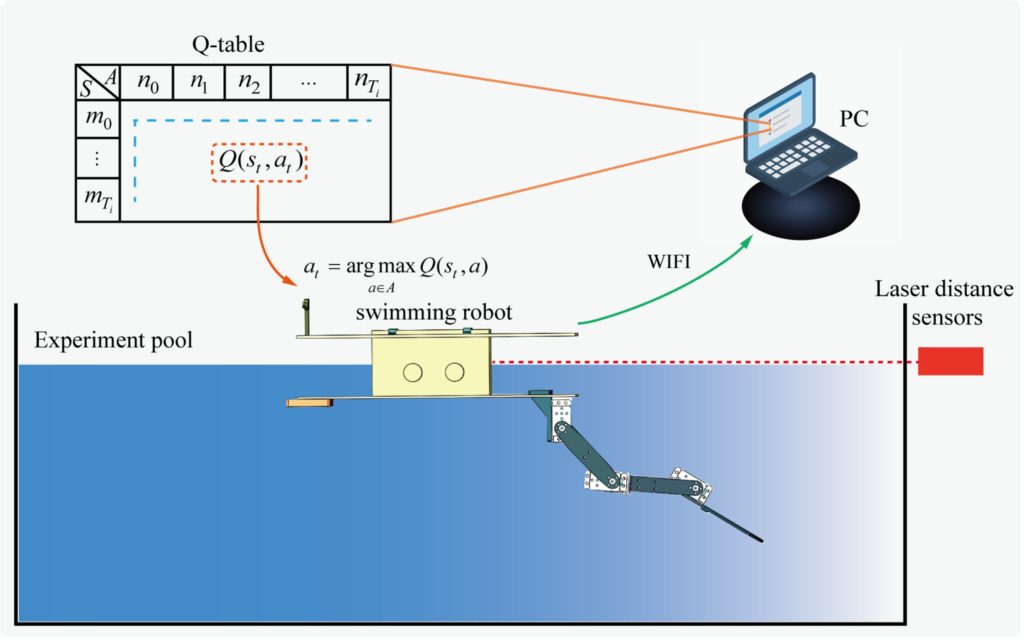 Princip výcviku bobřího robota
Princip výcviku bobřího robota
Podvodní roboti jako ten, který vytvořil Chen a jehokolegové jsou nelineární systémy a jejich pohyby zahrnují komplexní hydrodynamiku. Přesné modelování jejich pohybu tedy může být velmi složitým úkolem vyžadujícím značné výpočetní zdroje.
Na rozdíl od jiných modelů ovládání ponorekRobotický přístup vyvinutý Chenem a kolegy nevyžaduje integraci složitých pohybových modelů založených na dynamice tekutin. Je to dáno tím, že je založeno na zjednodušení představ o práci kloubů odpovědných za plavání u bobrů. To usnadňuje trénování modelu a také snižuje neefektivní pohyby robota během tréninku.
„Kombinací posilovacího učení smechanismy, které jsou základem plaveckého chování bobrů, naše metoda implementuje robotickou kontrolu nad plaváním tak rychle a efektivně, jak je to jen možné,“ vysvětlil Chen. "Nejpozoruhodnější výhodou je, že se vyhne vytváření složitých modelů řízení pohybu a rychle implementuje ovládání plavání jednonohého robota podobného bobrovi."
Přečtěte si více
Americká družice „zahlédla“ neobvyklou zprávu ze Země
Zveřejněno video z rakety, která byla vypuštěna z experimentálního urychlovače
Monstrum ve středu naší Galaxie: podívejte se na fotografii černé díry v Mléčné dráze