Profesor Edward Anderson z Massachusetts Institute of Technology a jeho postgraduální studentka Sandra Liu
Rukojeť se skládá ze dvou pružných žebrovaných prstů,které se přizpůsobí tvaru předmětu, se kterým jsou v kontaktu. Tyto prsty, stejně jako u mnoha podobných vývojů, jsou vyrobeny z pružných plastových materiálů na 3D tiskárně. U svého robota však inženýři odstranili příčná žebra umístěná na vnitřní straně prstů a dodala jim tuhost. Místo toho vědci nainstalovali kameru a senzory.
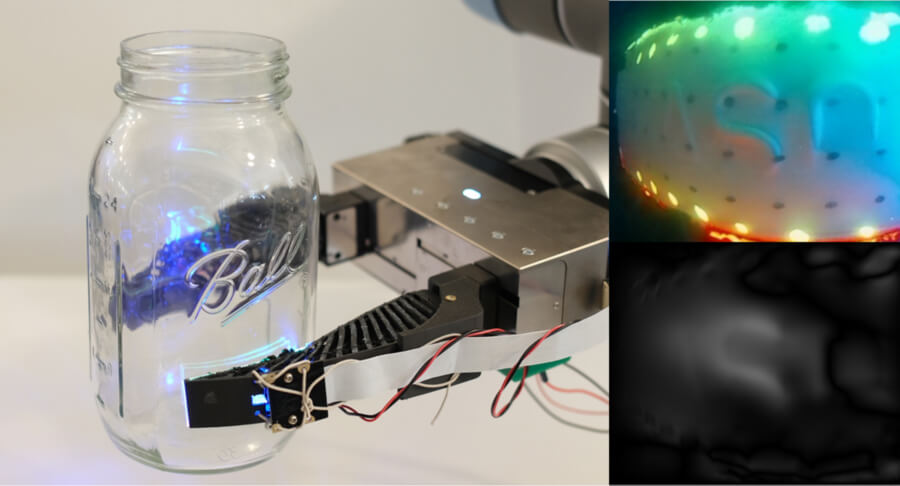
Tenkýakrylová fólie, ke které jsou připevněny „citlivé“ silikonové gelové polštářky. Hluboko v dutině je umístěna kamera nasměrovaná k akrylové vrstvě a celá dutina je osvětlena LED diodami.
Při dotyku s předmětem se prst jemně obtočíto, splývající s obrysy objektu. Kamera a speciální algoritmy analyzují změnu silikonových a akrylových desek. Na základě analýzy robot určí obecný tvar předmětu, nerovnosti povrchu, orientaci předmětu v prostoru a sílu, kterou je nutné předmět stlačit.
Vědci je otestovalizachytit dotykem pouze jednoho ze dvou prstů. Zařízení, které vytvořili, úspěšně manipulovalo s různými předměty, jako je mini šroubovák, plastová jahoda, tuba s barvou a sklenka vína. Přitom při snímání jahod dokázal interní senzor úspěšně detekovat zrnitost jeho povrchu a při práci se zavařovací sklenicí dokázal přečíst vyrytý název.
 Zdroj: MIT Computer Science and Artificial Intelligence Laboratory
Zdroj: MIT Computer Science and Artificial Intelligence Laboratory
Jak poznamenávají autoři práce, skleněné objektypředstavují výzvu pro senzory počítačového vidění kvůli lomu světla. Hmatové senzory umožňují obejít toto omezení. Když rukojeť zvedla sklenici, ucítil orientaci stopky v prostoru a mohl se ujistit, že sklenice směřuje nahoru, než ji položil na stůl.
Inženýři na vědomí, že vytvoření dutiny uvnitřprst mírně narušil stabilitu úchopu. Vědci plánují vylepšit design svého zařízení, aby tento nedostatek napravili. Kromě toho plánují vyvinout tříprstý úchop, který dokáže například sbírat kousky ovoce a vyhodnocovat jejich zralost.
Přečtěte si více:
MIT vytváří stacionární tepelný motor, který překonává turbíny
Po deseti letech práce vědci zpochybnili standardní model fyziky
Podívejte se, jak vypadá východ slunce na Marsu