Kdo jsou roboti?
Před pár lety se na Redditu objevila skvělá věc – vědci popsali komplex
Robotika je synergická aplikacepole působnosti. Skládá se z programování, mechatroniky a kybernetiky. Mechatronika je něco, co interaguje s reálným světem. A kybernetika je věda s více články, která zahrnuje především správu vytvořených programů.
co je robot?Před 15 lety by mnozí řekli, že se jedná o robotické rameno, které pracuje v továrně a provádí svařování nebo lakování. Další oblíbenou odpovědí je androidí robot z filmového světa. Je ale jedoucí vozík nebo bezpilotní prostředek robot? Ano, i to je jedna z oblastí robotiky. Letadla jsou také roboti, některé z nejnovějších vývojů zahrnují inteligentní technologie a jsou to ve skutečnosti autonomní roboti.
 Mobilní vozík je také robot
Mobilní vozík je také robot
Existuje také taková oblast robotiky jako polerobotika – „mobilní robotika“. To zahrnuje všechny roboty, kteří se pohybují na poli, v budově nebo pod vodou. Nejzajímavější aplikací je podle mě zemědělství.
Historie letadel
Historie letadel začala v minulostistoletí. Předtím létaly jen balony bez motoru a těžko je nazvat roboty. Na začátku minulého století fungovaly dva typy letadel – vzducholodě a letadla. První řízený let uskutečnili bratři Wrightové. První autopilot se navíc objevil celkem rychle, téměř 10 let poté, pomohl stabilizovat let.
Současný směr robotiky souvisí svývoj a dostupnost nových otevřených autopilotů jako je PixHawk (PixHawk je otevřený hardware pro ovladače, drony a další UAV. Používá se pro akademické, amatérské i profesionální účely). Příkladem příchodu dronů do života každého člověka je rozvoz pizzy společností Dodo Pizza společně s Copt Express, stalo se tak v roce 2014.
 Historie letadel
Historie letadel
Jak se dron ovládá
Moderní letadla používají jedenze tří principů vytváření vztlaku – aerostatického, proudového nebo aerodynamického. Aerodynamický princip letu a vytvoření vztlaku (svržení části vzduchu) lze realizovat buď pohybem celého aparátu, vybaveného pevnou nosnou plochou (křídlem), nebo pohybem jednotlivých nosných dílů. zařízení (hlavní rotor, ventilátor) vzhledem ke vzduchu.
 Jak zařízení létají
Jak zařízení létají
Dron má vrtuli, která vytváří vztlak.Jakmile se zařízení odlepí od země, začne pohybovat vrtulí rychleji a zvedne se. Ale síla akce se rovná síle reakce. Když se vrtule otáčí, vzniká moment opačným směrem - to je konstrukce vrtulníků a koptér. Pokud má vrtulník jednu vrtuli, nebude stabilní. Proto zařízení využívá buď dvourotorové schéma nebo ocasní rotor.
Kvadrokoptéra má velmi jednoduchý design -má obvykle čtyři šrouby, z nichž dva se otáčejí v jednom směru a dva v opačném směru. Pokud se uživatel potřebuje pohnout vpřed, některé vrtule se otáčí pomaleji, zatímco jiné rychleji. A pokud chce uživatel zatáčet, pak některé šrouby umístěné diagonálně zrychlují, zatímco jiné zpomalují.
 Jak létá kvadrokoptéra
Jak létá kvadrokoptéra
Pohyby vrtulníku v rozích souvisí s pohybem podélsouřadnice. Pokud se chce pilot pohnout vpřed, musíme dron nejprve naklonit dopředu a poté, jak se elektrické zařízení táhne dopředu, jej stabilizovat v bodě, kde chceme zůstat.
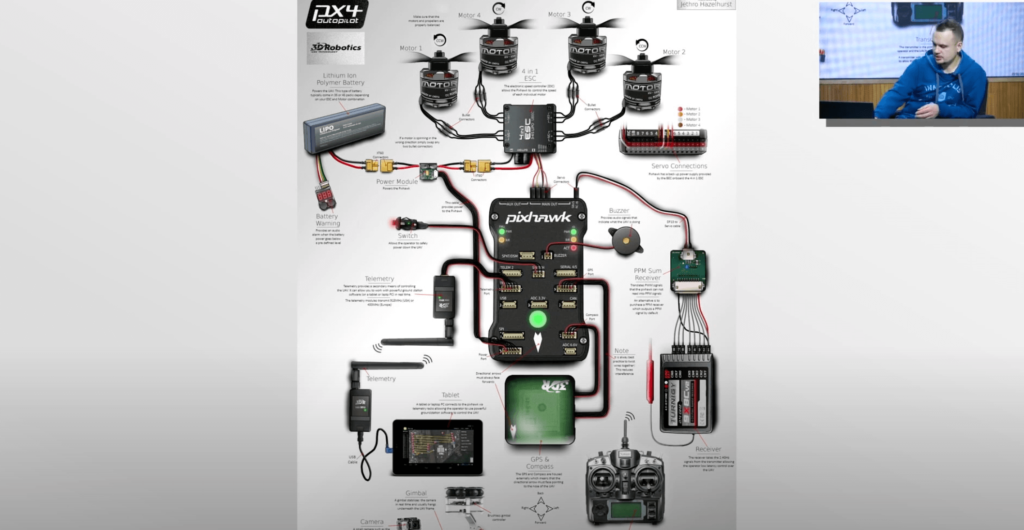
Toto je schéma jednoho z nejpopulárnějších autopilotů,na jejichž základě lze vyrábět nová zařízení. Připojuje se ke všem motorům a senzorům. Kromě toho mají motory vlastní řídicí jednotku, regulátor ESC - Electronic Speed Controller, který řídí rychlost motoru.
Ze senzorů je tu GPS, aby to dron mohlpracovat venku, létat na body a stabilizovat polohu. Uvnitř samotného autopilota je ale také IMU - modul inerciálního senzoru, který mu umožňuje určovat náklonové úhly. K dispozici je také komunikační kanál, pozemní řídící stanice a baterie.
 UAV zařízení
UAV zařízení
Jak bylo uvedeno výše, existuje úroveňovládání motoru - bez váhání můžeme nastavit rychlost otáčení. Zbytek úrovní funguje na stejném principu: další je kontrola orientace.
Nejprve však musíme ovládat rychlost otáčení- FPV vrtulníky létají na této úrovni (zařízení, která umožňují sledovat obraz z kamery dronu v reálném čase z první osoby (FPV - First Person View). Zkušení piloti nastavují rychlost otáčení a neustále řídí pomocí joysticku. Další fáze je, kdy uživatel může stabilizovat úhel, ale dron se bude stále pohybovat. Dále je řízení rychlosti a nejvyšší je polohové řízení, manévry pro přesun do bodu nebo pohyb po dané trajektorii.
Ti, kteří chtějí programovat, stavět ařídicí drony - měli byste věnovat pozornost open source autopilotu PIX4. Kolem letecké robotiky je celá komunita (ROS - robotický operační systém, nebo Open robotics), existují simulátory pro drony. Mnoho experimentů lze proto provádět v simulátoru, aniž byste měli k dispozici samotný dron.
Etapy vývoje dronu
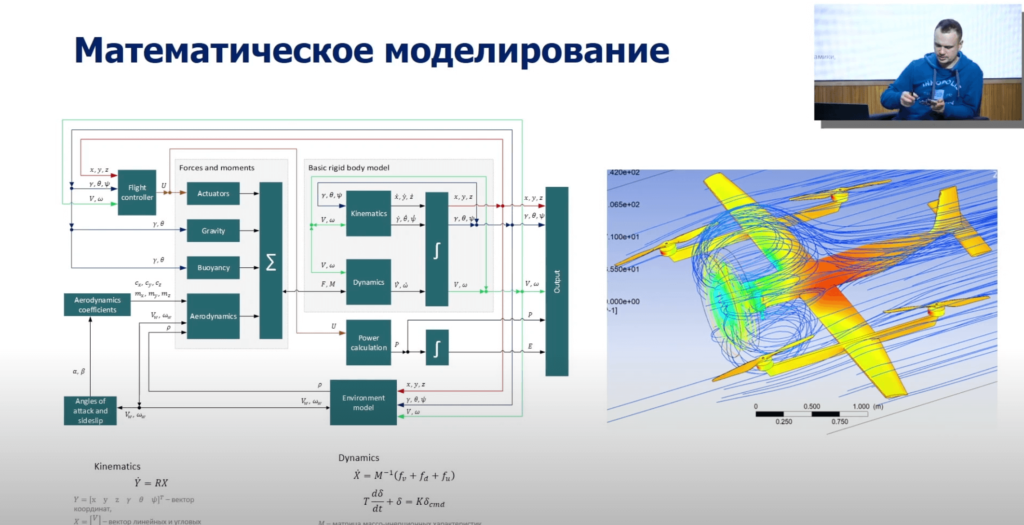
Výzkumníci začínají s konceptuálnímmodelování a pak potřebují sestavit přesný model přístroje. Aniž bychom zacházeli do vzorce, model vrtulníku je v podstatě model tuhé karoserie. Toto je druhý Newtonův zákon rozšířený na systémy částic. Má translační a rotační pohyb, existuje kinematika a dynamika pohybu a abychom mohli popsat model konkrétního zařízení, musíme sem přidat rovnici sil působících na konkrétní dron.
 Jak se modelují UAV
Jak se modelují UAV
Dalším krokem je vývoj systémuřízení. Půjdeme-li klasickou cestou: nejprve zjistíme přesný matematický model a na jeho základě již syntetizujeme řídicí algoritmus nebo nové vzorce. Do řídicího systému lze zahrnout všechny úrovně: plánování pohybu, vnímání prostředí, odhad stavu pomocí senzorů. Algoritmy nám umožňují zpřesnit naše souřadnice a data.
 Systém ovládání dronu
Systém ovládání dronu
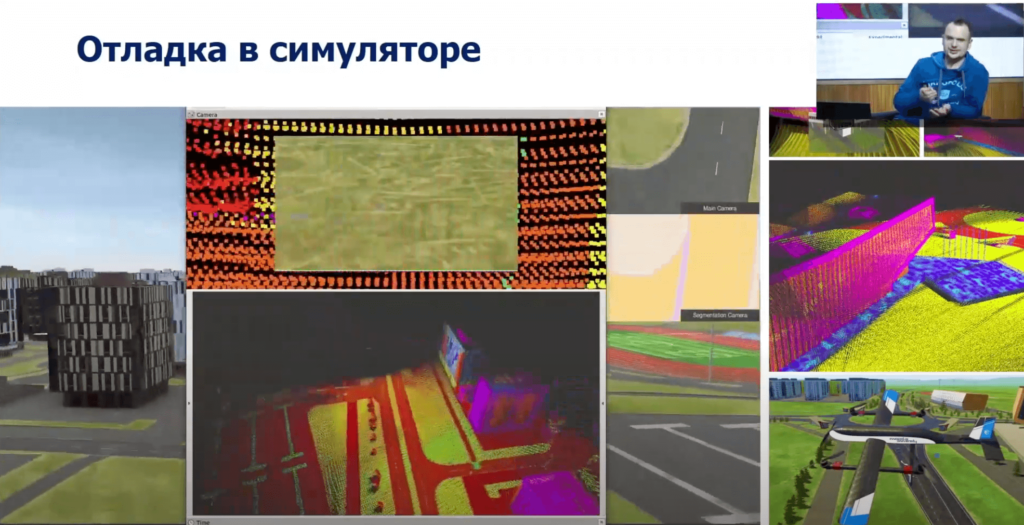
Když existuje řídicí algoritmus, může to být okamžitěpoužít, ale je to docela drahé. Zařízení padají při sebemenší chybě – s tím je třeba počítat a zálohovat. K testování se používají simulátory.
Níže je virtuální prohlídka Innopolisje produktem naší univerzity, je k dispozici ke stažení na GitHubu. Nejedná se pouze o vizuální komponentu, ale také o data všech senzorů zařízení. Má všechny polohové senzory, ovládá se jako dron a dokáže odladit všechny řídicí algoritmy.
 Jak se drony učí v simulaci
Jak se drony učí v simulaci
Když se na základě zkušeností se simulátorem objevívíce důvěry – můžete přejít k implementaci hardwaru. Jsou zde zobrazeny jeho součásti: výroba zařízení z uhlíku a kompozitu, tvorba elektroniky, umístění motorů, jejich upevnění.
Testy nezačínají na ulici:Nejprve se zařízení testují na závěsu nebo speciálním stojanu. Lze je použít k odladění prvků fungování bezpilotního letounu. Ukazuje se zde například letoun s vertikálním vzletem a přistáním - jedná se o křížence vrtulníku a letadla na videu můžete vidět, jak se vyrovnává s vnějšími poruchami a udržuje úhel; Vpravo je docela šílený experiment, kdy nastartujete pět motorů najednou a uvidíte, jak si s tím řídicí systém poradí.
 Jak se staví drony
Jak se staví drony
Po testování se přesunou k letům -malé vzlety při nízkých rychlostech, kontrolovaný pohyb s pilotem, který umí převzít řízení. Poslední akord je zcela bezpilotní let.
Zařízení startuje vertikálně -„jako helikoptéra“, pak se zapne jeho hlavní motor, dron zrychlí, přepne se do režimu letadla a vyvine dostatečnou rychlost, aby křídlo fungovalo. Poté se vypnou obrysové vrtule a letí jako letadlo - proces přistání probíhá v obráceném pořadí.
Co se děje s drony
Jeden z úkolů, které jsou modernívědci — obcházení překážek za letu. Některé drony už to umí, ale úkol je trochu širší – je potřeba naučit zařízení co nejrychleji se pohybovat v prostředí s překážkami. A stále je zde prostor pro pokusy a vylepšení algoritmů.
Dalším příkladem takového testování je let doles. Je zde velmi zajímavý přístup – jsou zde použity nejen nové algoritmy, ale také senzory – událostní kamera. Jedná se o velmi vysokofrekvenční kameru, která přenáší rozdíl mezi snímky v každé časové jednotce: to vám umožňuje rychle ovládat překážky a reagovat na ně.
V oblasti plánování pohybu dronůkonkurence: kdo to udělá rychleji. Úkolem je zmapovat neznámou oblast, postavit její trojrozměrnou reprezentaci, najít na ní předměty. Létali jsme na univerzitě, ale také řešili problém s hledáním předmětů. Naše výsledky byly ještě lepší než známé publikované algoritmy.
Soutěží se v závodě dronů.Vyrábějí se na zařízeních s kamerou, kdy má pilot brýle a ovládá dron, aby co nejrychleji proletěl bránou. Docela velkolepá akce, kde se stejný úkol musí plnit v automatickém režimu. Bohužel zatím počítač dokázal porazit člověka pouze v šachu a robot s dronem nedokázal předběhnout lidského pilota, i když pokrok je již poměrně vážný. Dron s pomocí algoritmu strojového vidění může takové úkoly provádět, práce spočívá pouze ve zvýšení rychlosti.
Další konkurencí je Microsoft Games ofdrony, probíhá na simulátoru. Ve stejné oblasti se koná jedna z nejznámějších předních soutěží v Saúdské Arábii. Účastníci se tam nabírají na tři roky dopředu.
Bezpilotní zařízení se používají pro show s drony- Jsou to velkolepé akce, které se dnes staly náhradou za ohňostroje. To ale není jediné skupinové využití – mohou kontrolovat větší plochu.
Kde uplatnit
Aby to nevypadalo jako výhradně vědeckyvývoj, níže je ukázka dronu Skydio. Nyní se jedná o nejpokročilejší zařízení z hlediska autonomie. Toto je příklad toho, jak se moderní technologie – kartografie, vyhýbání se překážkám, dopravní plánování využívají společně v produktu, který je již uživateli k dispozici.
Dalším směrem jsou nové designyletadlo. Jedním z nich jsou skládací drony. Jedno takové zařízení může po nehodě vletět do těsných prostor ke kontrole. Dalším příkladem je dron, který se může rozvinout. Může například vyletět z úzké pneumatické trubky a pak létat jako obvykle.
Máme také projekt v této oblasti - to jeměkký Tensodron. Jedná se o první soft-shell dron, který létá. Potěší, že ji můžete upustit a zůstane nedotčená. Navíc můžete měnit délku nosníků, napětí lanek.
Dva příklady, které ožijíbrzy. Za prvé, doručování pomocí dronů. Nyní je zde velmi zajímavá implementace, kdy kombinujeme balíkový terminál a přistávací stanici dronu - v tomto případě se nemusíme starat o to, kdy dron přiletí, kde přistane, abychom se k němu dostali na čas a vyzvedněte náklad před jeho odcizením. Druhým příkladem je létající taxi. Toto je nejvíce vzrušující oblast vývoje a již existují funkční prototypy. To se ale stane až v příštím desetiletí.
Jaký vývoj v oblasti létajících taxi se objevil za posledních 6 let:
- Společnost "Hover" představila zařízení snízkohlučný elektromotor a kompaktní rozměry – jako auto. Startuje do výšky 150 m a přistává na standardním parkovacím místě. Dron je určen pro dva cestující, maximální užitečné zatížení je 300 kg a rychlost 200 km/h.
— V roce 2016 ruská společnost Hoversurfukázal hoverbike, který můžete vozit s sebou a kdykoliv vzlétnout z běžného městského parkovacího místa. Dosahuje rychlosti až 100 km/h a výška zdvihu je z bezpečnostních důvodů násilně omezena na 5 metrů.
— V roce 2018 vyvinuto cestujícím AirbusuLetoun Alpha One VTOL vystoupal do výšky 5 metrů a ve vzduchu zůstal 53 sekund. Uživatel bude moci volat UAV prostřednictvím aplikace a dostat se z jednoho bodu do druhého jak ve městě, tak mimo něj.
— V roce 2020 bylo vyrobeno aerotaxi CityAirbusprvní volný let. Testování probíhalo na předměstí Paříže ve městě Ile-de-France Letoun CityAirbus je schopen se pohybovat rychlostí až 120 km/h na vzdálenost až 30 km. Hmotnost létajícího taxíku je více než 2,2 tuny, CityAirbus je vybaven třemi sedadly pro cestující a jedním sedadlem řidiče.
- V roce 2022 čínský startup Pantuo Aviation představil T1, demonstrátor létajícího taxi se vzduchovým potrubím. Létat bude rychlostí přes 300 km/h a dolet bude 250 km.
Přečtěte si více:
Vesmírná sonda letěla 200 km od Merkuru. Podívejte se, co viděl
Vědci odhalují, jak vitamíny ovlivňují výskyt rakoviny
Čínská helma na čtení myšlenek spustí alarm, když člověk uvidí porno obsah