Ingeniører fra University of Cambridge har udviklet en blød robothånd trykt på
Forskerne brugte tryktEn 3D-printer af en antropomorf hånd implanteret med taktile sensorer, så hånden kan "føle", hvad den rører ved. Hånden var kun i stand til passiv bevægelse baseret på håndleddet. "Den store fordel ved dette design er den rækkevidde af bevægelse, som vi kan få uden at bruge nogen aktuatorer," siger forfatterne.
Træning af en "passiv" robotarm. Video: University of Cambridge
Forskere udførte mere end 1.200 test med en robotarm,ser hendes evne til at gribe små genstande uden at tabe dem. I starten blev robotten trænet ved hjælp af små 3D-printede plastikbolde og greb dem ved hjælp af forudbestemte handlinger afledt af menneskelige demonstrationer.
Robotten brugte trial and error tilfinde ud af, hvilken optagelse der vil lykkes. Efter at have afsluttet sin boldøvelse forsøgte han at få fat i forskellige genstande, inklusive en fersken, en computermus og en rulle bobleplast. I disse test var hånden i stand til at gribe 11 ud af 14 genstande.
Indfangning af objekter af forskellige størrelser, former og teksturer- en opgave, der er enkel for en person, men svær for en robot. De fleste af nutidens avancerede robotter er ikke i stand til at udføre manipulerende opgaver, som små børn nemt kan klare. For eksempel ved folk instinktivt, hvor meget kraft de skal bruge for at løfte et æg, men for en robot er dette et problem: ikke stærk nok vil få objektet til at falde, for stærk vil knække ægget.
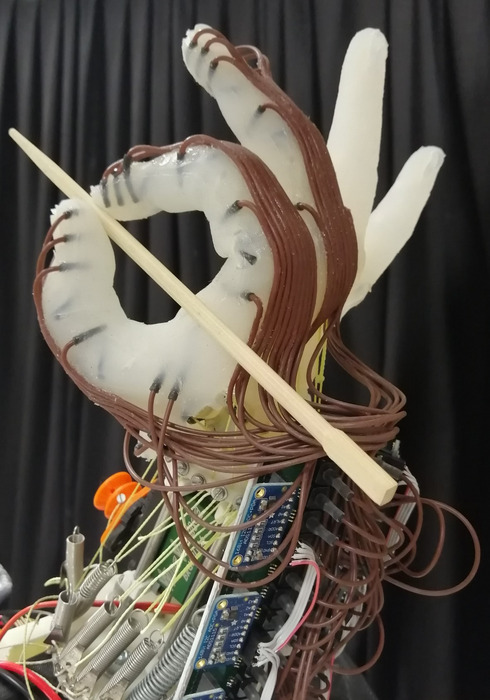 Prototype robotgriber. Billede: University of Cambridge
Prototype robotgriber. Billede: University of Cambridge
Sofistikeret teknologi med motoriserede fingrekræver en betydelig mængde energi og et stort antal komplekse og dyre aktuatorer til hver led. Det passive greb, som ingeniørerne har foreslået, gør robotten meget nemmere at styre og meget mere energieffektiv. Forskerne mener, at deres tilpasningsdygtige design kan bruges til at udvikle billige robotter, der er i stand til mere naturlige bevægelser.
Læs mere:
Se på det højeste opløsningskort over Mars: 110.000 billeder og 5,7 billioner pixels
"Hav" af kvarker inde i én proton: hvad består en elementær partikel af
Nyt billede af Hubble forundrede videnskabsmænd
På omslaget: en prototype robotgriber. Billede: University of Cambridge