Robotten kan ikke kun flytte, men også manipulere objekter. Ifølge forfatterne er efterspørgslen i dag efter
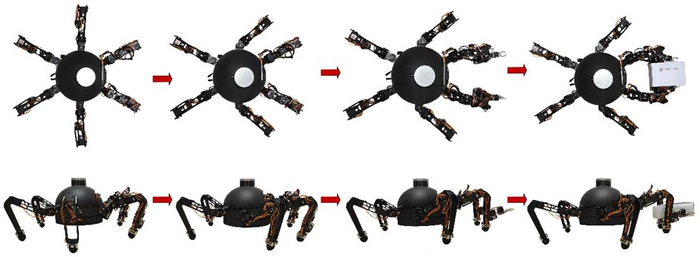
Derfor præsenterede forfatterne til det nye værk et design baseret på en lemmekanisme, der er udstyret med forskellige sluteffektorer for at forbedre ydeevnen.
Holdet bemærker, at manipulation underbevægelse er en god måde at øge effektiviteten og vinde tid. Den nye robot blev kaldt ALLOMAN hexapod, takket være integrationen af ben og arme, kan robotten manipulere objekter mobile.
Indtil videre er ALLOMAN hexapod eksperimentelprototype. På næste fase af arbejdet vil forfatterne introducere flere funktioner til manipulation i det. Forfatterne planlægger at bruge deres udvikling i områder, hvor der er brug for multifunktionelle platforme, for eksempel for at sikre byens sikkerhed, kampen mod terrorisme og planetarisk udforskning.
Læs mere:
Det er blevet jaget i århundreder: hvad ved vi om planeten Vulcan ved siden af Solen
Astronomer har fundet en planet nær Jorden: den har en meget mærkelig bane
Uforklarlig dualitet fundet i elementær partikelfysik: hvad vil det føre til