Forskere fra det italienske teknologiske institut har præsenteret en prototype på en trebenet robot, der
MARM robotplatformen består afcentral krop, tre lemmer og en speciel docking-enhed. Sidstnævnte bruges til at oplade enheden og udveksle data. Når man laver en robot, har forskere sørget for muligheden for at arbejde både i nærvær af tyngdekraft og i mikrotyngdekraft.
Robot MARM. Video: IIT
MARM-robotten kan bruge tre lemmer tilbevægelse ved at gribe standardforbindelser på stationsoverflader og kravle hen over dem. Derudover kan den samle og placere komponenter af forskellige enheder, såsom at flytte og installere de 1,2 m brede modulære sekskantede plader, der bruges på ISS, og manipulere orbitale plug-ins.

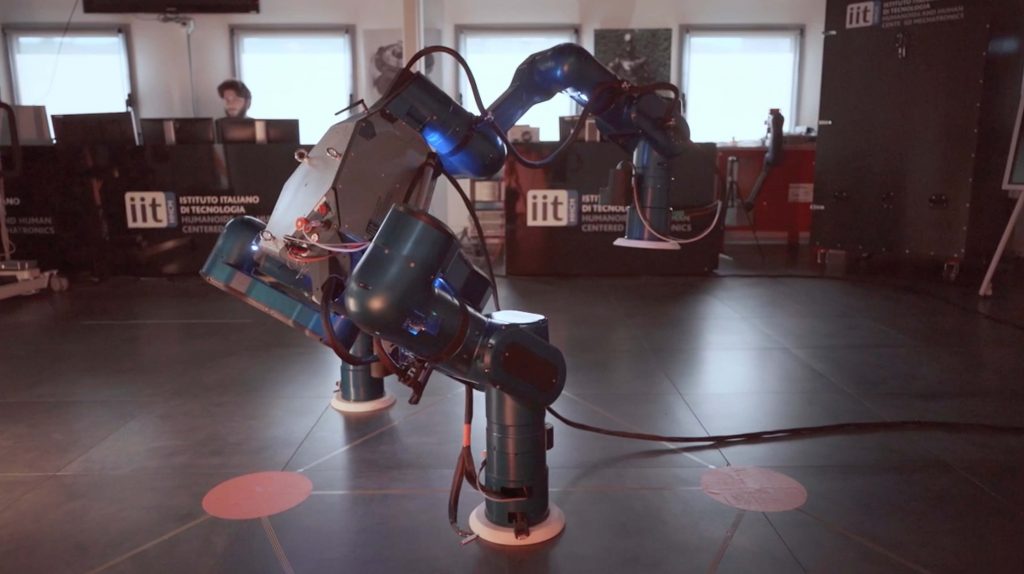
Robot MARM. Fotos: IIT
Konfiguration af tre lemmer - grundlæggendeforskellen mellem den nye robot og tidligere udviklinger. Dette giver ifølge ingeniører større fleksibilitet i betjeningen af enheden. For eksempel kan han bruge to "hænder" til at arbejde, holde fast i overfladen ved hjælp af den resterende.
Forskere foreslår at bruge MARM tilafhente varer fra lageret, flytte dem til det rigtige sted, afhente og placere dem. Prototypen vil blive testet i mikrotyngdekraft med dette scenarie i tankerne, hvorefter en fungerende version vil blive skabt til at blive sendt til ISS.
Læs mere:
Forskere fra permafrostzonen: hvordan de udvikler smart tøj og en kræftvaccine
To planeter er blevet fundet ikke langt fra Jorden. Måske er de beboede
Forskere har fundet ud af, hvem der nyder godt af dinosaurernes død