Ingeniører fra École Polytechnique Fédérale de Lausanne har udviklet en metode, der gør det muligt for en robot at
Ornithopter landing. Video: EPFL
At lande en fugl på en gren ser ud til at være en af de mestnaturlige processer. Men faktisk kræver det en ekstremt præcis balance mellem tid, slagkraft, hastighed og bevægelsesnøjagtighed, bemærker forfatterne til udviklingen. Ikke overraskende har ingeniører indtil nu ikke været i stand til at gengive disse bevægelser i robotter.
 Ornithopter landingssystem. Billede: Raphael Zufferey et al., Nature Communications
Ornithopter landingssystem. Billede: Raphael Zufferey et al., Nature Communications
Forskere har løst problemet med præcis balanceat udstyre ornithopteren med en indbygget computer og navigationssystem. Den bruger eksterne kilder til at fange bevægelse og bestemme enhedens position. Ornithopterens klobens vedhæng var præcist kalibreret til at kompensere for op-og-ned-vibrationer under flyvningen, da dronen forsøgte at gribe en aborre.

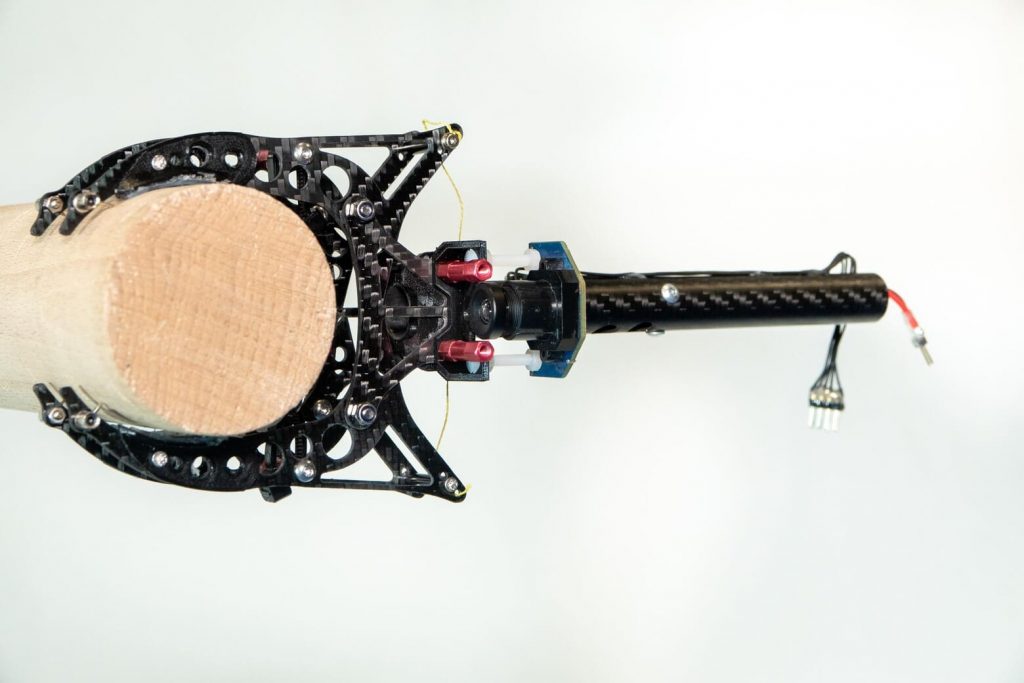
Ornithopter montering. Billede: EPFL
Selve kloen var designet på en sådan måde, atabsorbere momentum af robottens bevægelse ved stød, og lukke hurtigt og sikkert for at understøtte dens vægt. Når robotten først er på aborren, bliver den på aborren uden at bruge energi. Forskerne udfører i øjeblikket flyvetests i laboratoriet.
Når ornithopteren lærer af sig selvlander på en trægren, vil den være i stand til at udføre visse opgaver, såsom diskret indsamling af biologiske prøver eller at tage målinger fra træet. Til sidst kan det endda lande på menneskeskabte strukturer, hvilket kan åbne op for nye anvendelser.
Raphael Zufferey, medforfatter af udviklingen
Læs mere:
To planeter er blevet fundet ikke langt fra Jorden. Måske er de beboede
En unik meteor omskrev solsystemets historie: hvor kom den fra
Prototypemodulet på det nye ISS blev sprængt i luften i NASA-centeret. Se hvordan det var