Fiskestimer udviser kompleks, synkroniseret adfærd, der hjælper dem med at finde føde, migrere og
Denne type decentraliseret, autonomselvorganisering og koordinering har længe tiltrukket videnskabsmænd: de besluttede at bruge det i robotteknologi. Et team af forskere fra Harvard School of Engineering and Applied Sciences. John A. Paulson (SEAS) og Wyss Institute for Biological Engineering har udviklet fiskeinspirerede robotter, der kan synkronisere deres bevægelser.
Robotter arbejder ofte steder, derutilgængelige eller farlige for mennesker, og områder, hvor menneskelig indgriben måske ikke engang er mulig. I sådanne situationer skal du virkelig have en meget autonom robotsværm. Ved at udnytte fiskens adfærdsmæssige færdigheder og 3D visuelle perception, var vi i stand til at skabe et system, der har en høj grad af autonomi og fleksibilitet under vandet.
Florian Berlinger, ph.d. kandidat ved SEAS og Wyss og første forfatter af papiret
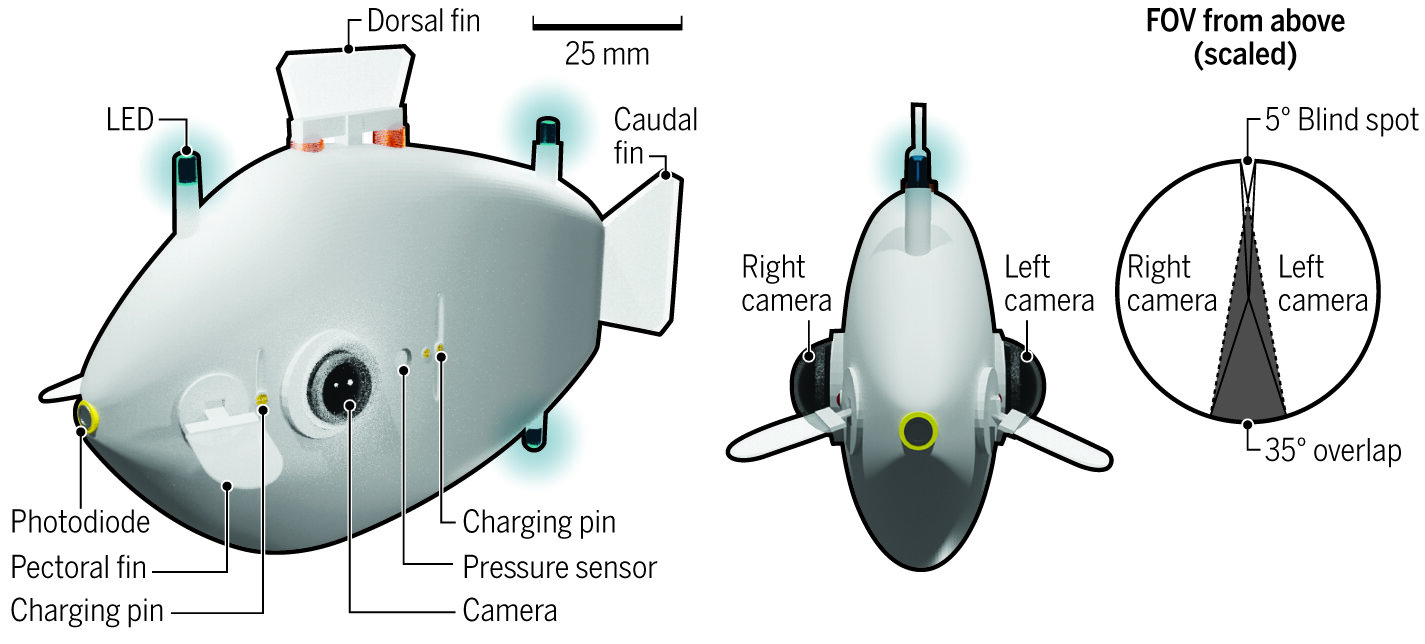
En robotsværm inspireret af fisk har modtagetnavn Blueswarm. Forskere har udviklet et visionsbaseret koordinationssystem baseret på blå lysdioder. Hver undervandsrobot er udstyret med to kameraer og tre LED-lys. Indbyggede kameraer registrerer LED-lysene fra nærliggende fisk og bruger en speciel algoritme til at bestemme deres afstand, retning og kurs.
Så Blueswarm kan demonstrere kompleks selvorganiseret adfærd: især aggregering, spredning og cirkeldannelse.
Læs mere
Abort og videnskab: hvad vil der ske med de børn, der føder
Forskning: mennesker vil ikke være i stand til at kontrollere superintelligente AI-maskiner
Tjek de smukkeste billeder af Hubble. Hvad har teleskopet set i 30 år?