Forfatterne af det nye arbejde antog, at modeller bedst trænes ved hjælp af forudsigelse
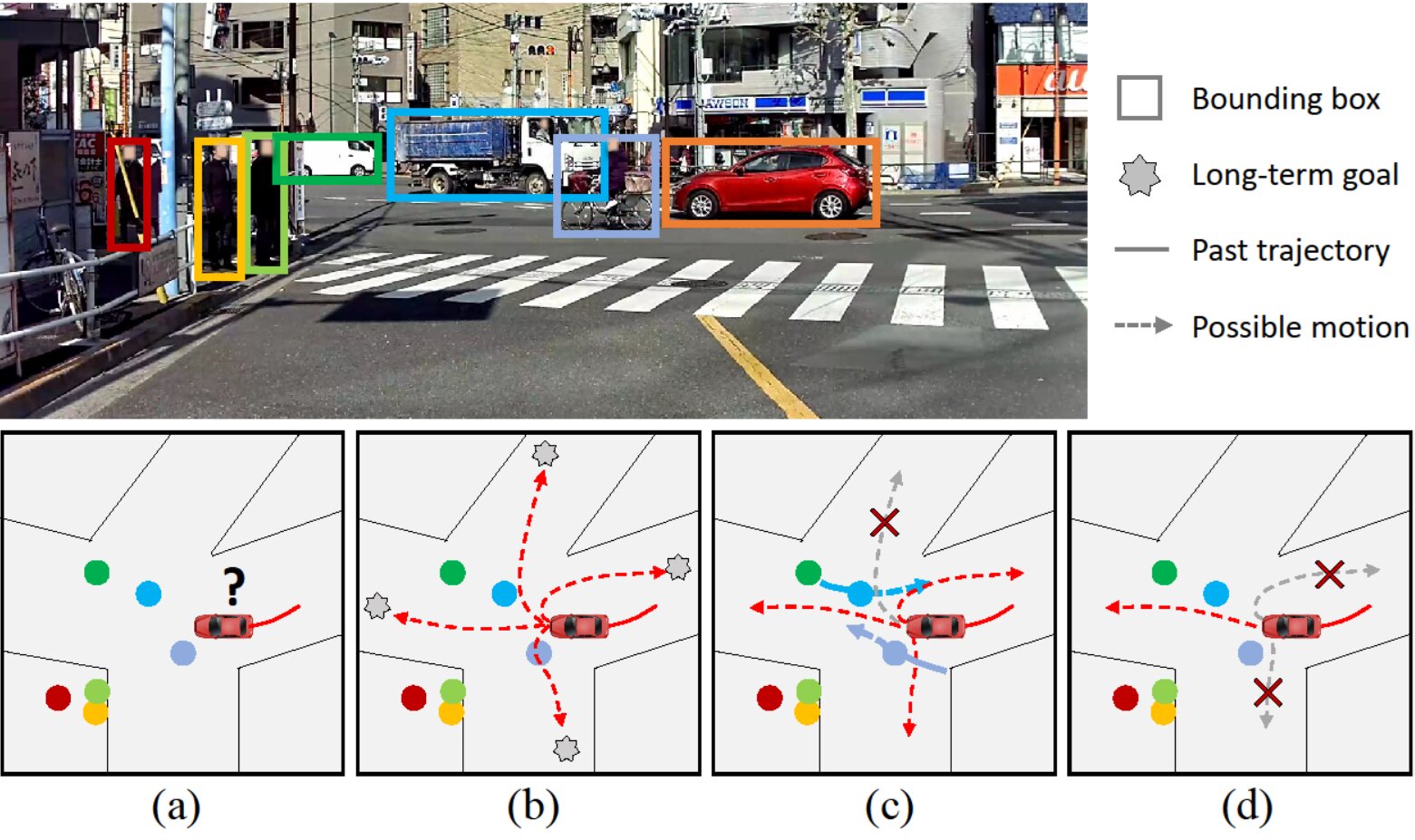
Forskerne planlægger at udvikle en arkitektur, der tager hensyn til både kortsigtede og langsigtede mål – disse er hovedkomponenterne, når man skal vurdere en fodgængers eller en bils intentioner.
For eksempel er der en bil, der befinder sig i et krydsønsker at dreje til venstre. Det er vigtigt at tage højde for ikke kun transportens dynamik, men også hvordan intentionen kan ændre sig afhængigt af forskellige faktorer: på grund af eget ønske, andre trafikanter eller forhindringer.
Dernæst koder algoritmen først de tidligere erfaringer, som modellen blev trænet på til at forudsige, hvad de langsigtede og kortsigtede konsekvenser kan være.
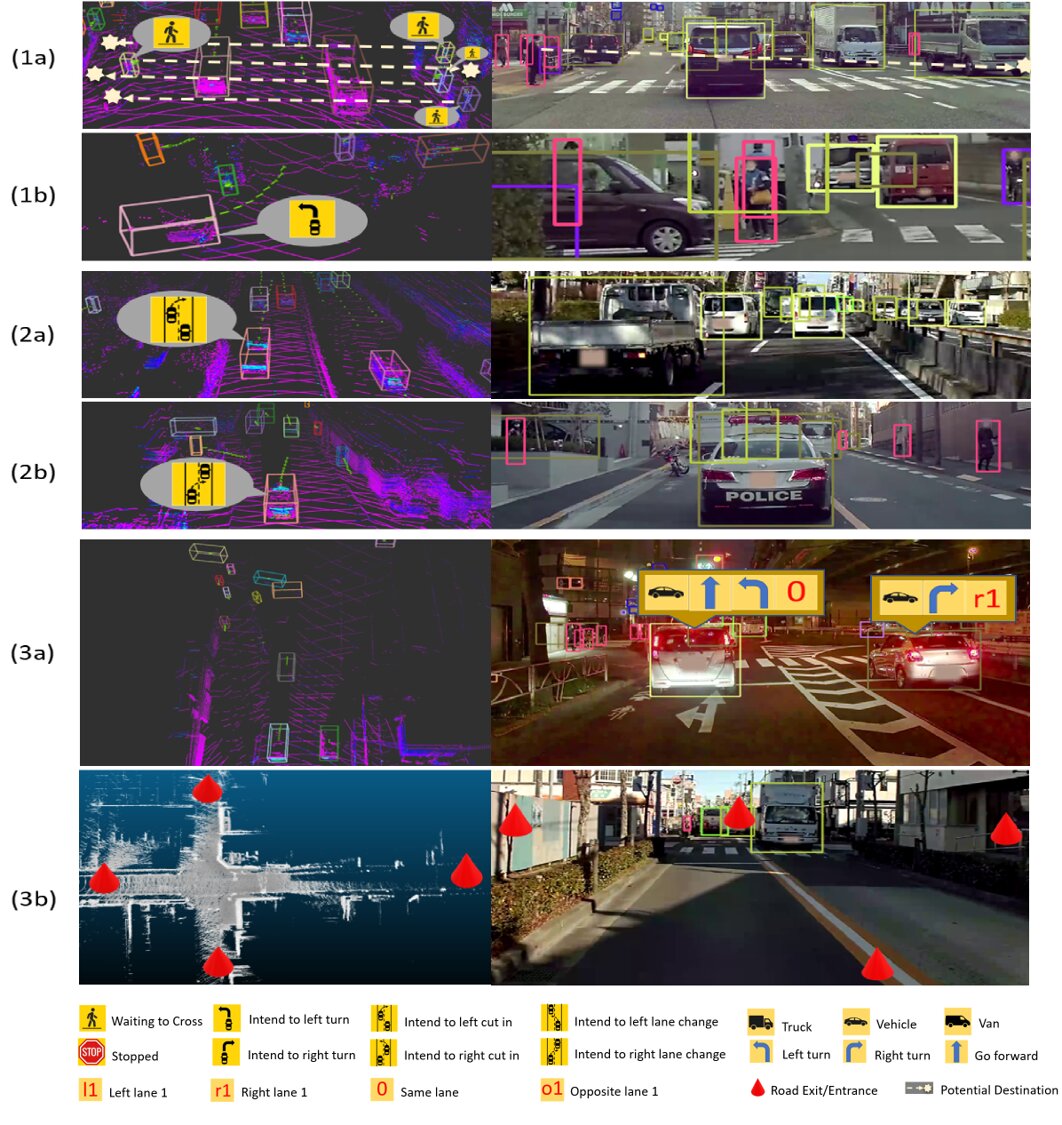
Modellen tildeler alle omgivende objektersignaler er "hensigter", der kan ændre sig undervejs, "miljø" såsom vejskilte og træer, der påvirker agenternes intentioner, og "kontekstuelle signaler" såsom vejr og vejforhold.
Forskerne evaluerede deres model i en række tests og fandt ud af, at den overgik andre avancerede baneforudsigelsesmetoder med 27 %.
Udviklerne mener, at modellen kan værebruges til at forbedre sikkerheden og ydeevnen for autonome køretøjer. Derudover kan andre forskningsgrupper bruge LOKI -datasættet til at udarbejde deres egne modeller til at forudsige fodgængeres og køretøjers stier på vejen.
At læse Yderligere:
Ny iOS 15: udgivelsesdato, iPhone-design og funktioner. Vi fortæller alt, hvad der er kendt
Et ultratyndt materiale blev fremstillet af hvidt grafen. Det vil erstatte servere
Se en tung angrebsdrone, der bærer masser af våben