Forskere fra University of Illinois i Urbana-Champaign og Princeton University brugte
Forskerne brugte en lille spiralaktuatorer, der efterligner musklernes arbejde i klikbillens thorax. En kunstig aktuator trækker i en lille stråle, hvilket får robotten til langsomt at bøje og lagre elastisk energi. Når den er frigivet, skubber denne energi robotten op.
I tidligere undersøgelser har forskere fundet ud af detklikbillen har en speciel spiralmuskel. Det lagrer energi og udløses for eksempel, når et insekt ruller ind på ryggen. Under påvirkning af en skarp udretning af denne muskel kaster billens krop op til en stor højde, flere gange dens størrelse. Den samme mekanisme fungerer for robotter.
En af de største udfordringer ved robotteknologi i lille skala er at finde et design, der er lille, men kraftigt nok til at overvinde forhindringer eller hurtigt forlade farlige steder.
Sameh Tawfiq, forskningschef
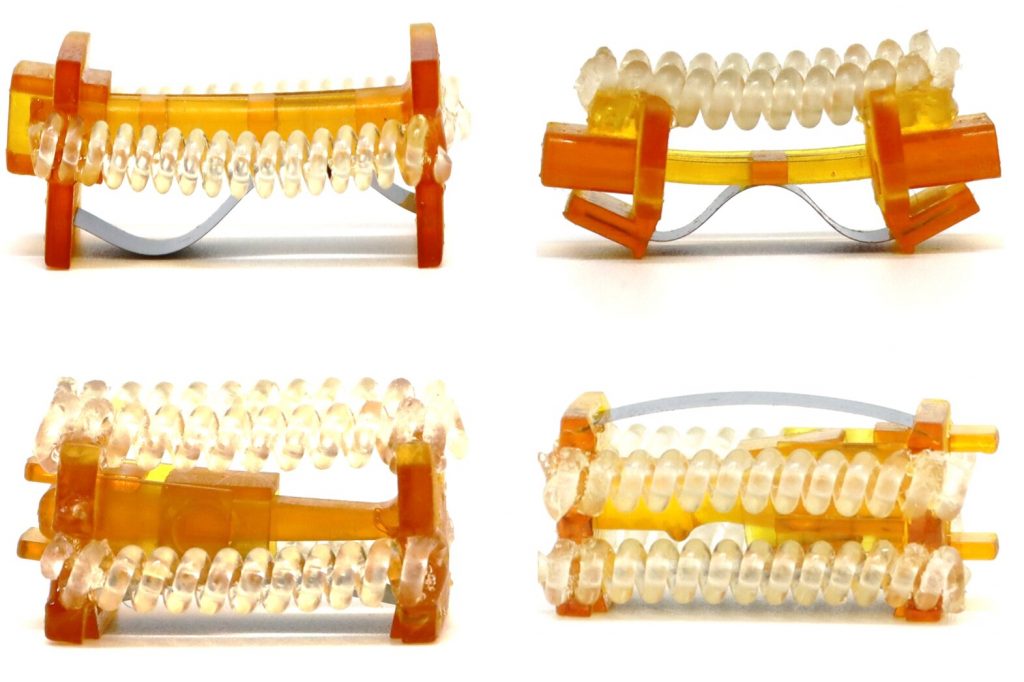 Varianter af design af springrobotter foreslået af forskere. Billede: University of Illinois Urbana-Champaign
Varianter af design af springrobotter foreslået af forskere. Billede: University of Illinois Urbana-Champaign
Forskere tror, at små robotter vilat komme ind på svært tilgængelige steder for at hjælpe med at udføre vedligeholdelse på store maskiner såsom turbiner og jetmotorer, eller i landbruget for at inspicere planter, såsom at tage billeder for at identificere problemer.
Læs mere:
En kæmpe solplet vender sig mod Jorden. Det er synligt med det blotte øje
Se, hvordan et bladløst fly flyver. Dens hastighed overstiger 900 km/t
Mælkevejen er unormalt stor for sin galaktiske filament
På omslaget: en kunstnerisk illustration af ideen. Billede: Michael Vincent, University of Illinois Urbana-Champaign