For nylig gennemførte videnskabsmænd en undersøgelse med det formål at genskabe den menneskelige evne til at bestemme
Artiklen fremhæver fordelene ved at udvikle robotter, der kan interagere med miljøet gennem berøring, ikke kun syn og lydbehandling.
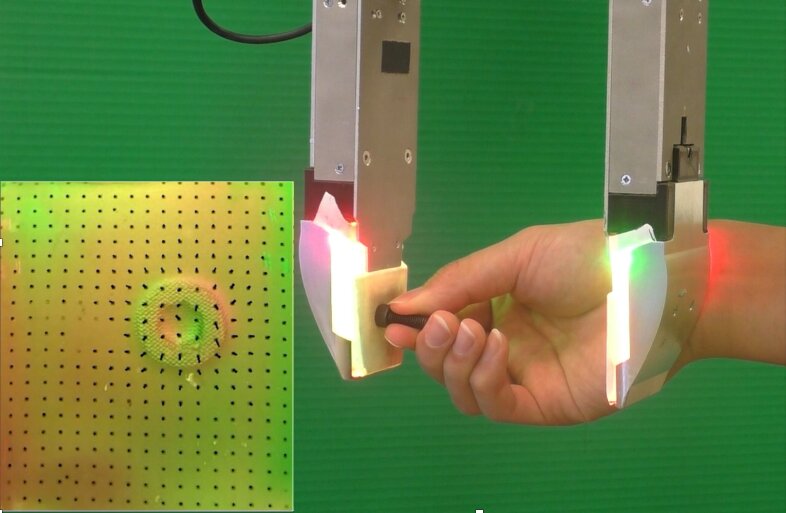
Målet med vores arbejde var at demonstrere det medMed taktil sansning i høj opløsning kan kendte objekter lokaliseres nøjagtigt allerede fra den første kontakt. Dette er et vigtigt fremskridt i forhold til tidligere arbejde med taktil lokalisering, da vi ikke er afhængige af andre former for ekstern perception (f.eks. syn) eller tidligere indsamlede taktile data forbundet med de manipulerede objekter.
Maria Bauza, en af forskerne
Den nye teknik lærer af simulering og gør det ikkekræver omfattende dataindsamling. Oprindeligt udviklede forskerne en struktur, der simulerer kontakter mellem et givet objekt og en taktil sensor, forudsat at robotten har adgang til data om det objekt, som den interagerer med (for eksempel om dens tredimensionelle form, egenskaber osv.).
Dernæst brugte forskerne modernemaskinlæringsmetoder til computersyn og repræsentationslæring for at matche virkelige taktile observationer indsamlet af robotten med et sæt kontakter genereret af simuleringsprocessen.
Grundlæggende er metoden udviklet af denne gruppeforskere kan modellere kontaktoplysninger simpelthen baseret på den tredimensionelle form af et objekt. Som følge heraf kræves ingen foreløbige taktile data indsamlet gennem omhyggelig undersøgelse af objektet. Dette gør det muligt for teknikken at generere stillingsestimater for et objekt fra første berøring af robottens taktile sensorer.
Læs mere
Jorden vil nå kritisk temperatur om 20 år
Abort og videnskab: hvad vil der ske med de børn, der føder
En plante, der ikke er bange for klimaændringer, er blevet navngivet. Det brødføder en milliard mennesker