Professor Edward Anderson fra Massachusetts Institute of Technology og hans kandidatstuderende Sandra Liu
Grebet består af to fleksible ribbede fingre,som tilpasser sig formen på den genstand, de er i kontakt med. Disse fingre er, ligesom i mange lignende udviklinger, lavet af fleksible plastmaterialer på en 3D-printer. Men i deres robot fjernede ingeniørerne de tværgående ribber placeret på indersiden af fingrene og gav dem stivhed. I stedet installerede forskerne et kamera og sensorer.
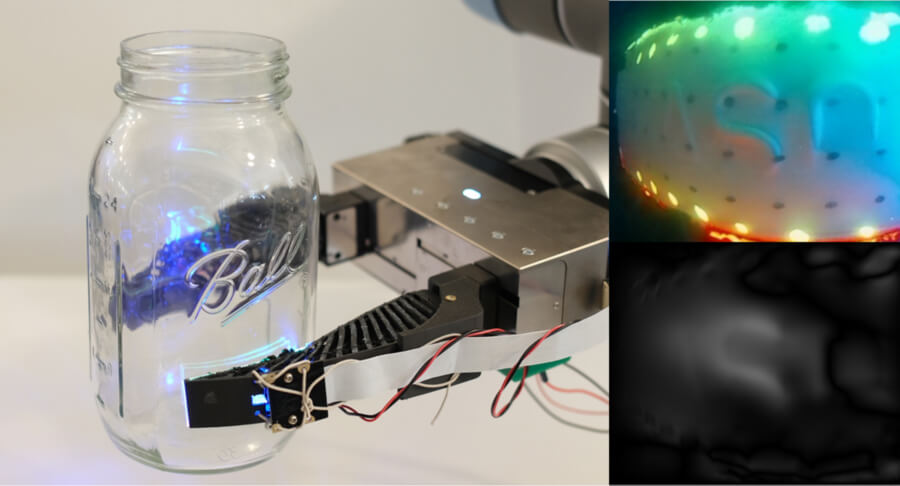
En tynden akrylplade, hvorpå der er fastgjort "følsomme" silikonegelpuder. Et kamera placeres dybt i hulrummet, rettet mod akryllaget, og hele hulrummet er oplyst af LED'er.
Når du rører ved en genstand, vikler fingeren sig forsigtigt rundtdet smelter sammen med objektets konturer. Kameraet og specielle algoritmer analyserer ændringen i silikone- og akrylplader. Baseret på analysen bestemmer robotten objektets generelle form, overfladeuregelmæssigheder, objektets orientering i rummet og den kraft, hvormed det er nødvendigt at komprimere objektet.
Forskerne testede deresfange ved kun at få en af de to fingre til at røre ved. Enheden, de skabte, manipulerede med succes forskellige genstande, såsom en miniskruetrækker, et plastikjordbær, et malingsrør og et glas vin. På samme tid, når den fangede jordbær, var den interne sensor i stand til med succes at registrere kornetheden af dens overflade, og når den arbejdede med en krukke, kunne den læse det indgraverede navn.
 Kilde: MIT Computer Science and Artificial Intelligence Laboratory
Kilde: MIT Computer Science and Artificial Intelligence Laboratory
Som forfatterne til værket bemærker, glasobjekterrepræsenterer en udfordring for computersynssensorer på grund af lysbrydning. Taktile sensorer giver dig mulighed for at omgå denne begrænsning. Da grebet løftede glasset, mærkede han stilkens orientering i rummet og kunne sikre sig, at glasset pegede op, inden han sænkede det til bordet.
Ingeniører bemærker, at skabe et hulrum indenifinger lidt forstyrret stabiliteten af grebet. Forskere planlægger at færdiggøre designet af deres enhed for at rette op på denne mangel. Derudover planlægger de at udvikle et tre-fingergreb, der for eksempel kan samle frugtstykker op og vurdere deres modenhed.
Læs mere:
MIT skaber en stationær varmemotor, der klarer sig bedre end turbiner
Efter ti års arbejde stillede forskerne spørgsmålstegn ved standardmodellen for fysik
Se hvordan solopgangen ser ud på Mars