Ingenieure der Universität Cambridge haben eine aufgedruckte weiche Roboterhand entwickelt
Die Forscher verwendeten gedrucktEine anthropomorphe Hand, die mit taktilen Sensoren in einen 3D-Drucker implantiert wurde, damit die Hand „fühlen“ kann, was sie berührt. Die Hand war nur in der Lage, sich passiv auf der Grundlage des Handgelenks zu bewegen. „Der große Vorteil dieses Designs ist der Bewegungsbereich, den wir ohne die Verwendung von Aktuatoren erreichen können“, sagen die Autoren.
Training eines „passiven“ Roboterarms. Video: Universität Cambridge
Wissenschaftler führten mehr als 1.200 Tests mit einem Roboterarm durch,beobachtete ihre Fähigkeit, kleine Gegenstände zu greifen, ohne sie fallen zu lassen. Zunächst wurde der Roboter mit kleinen 3D-gedruckten Plastikbällen trainiert und ergriff sie mit vorbestimmten Aktionen, die von menschlichen Demonstrationen abgeleitet wurden.
Der Roboter verwendete Versuch und Irrtum, umFinden Sie heraus, welche Erfassung erfolgreich sein wird. Nachdem er sein Balltraining beendet hatte, versuchte er, verschiedene Gegenstände zu greifen, darunter einen Pfirsich, eine Computermaus und eine Rolle Luftpolsterfolie. Bei diesen Tests konnte die Hand 11 von 14 Objekten erfolgreich greifen.
Erfassen von Objekten unterschiedlicher Größe, Form und Beschaffenheit- eine Aufgabe, die für einen Menschen einfach, aber für einen Roboter schwierig ist. Die meisten modernen Roboter von heute sind nicht in der Lage, manipulative Aufgaben auszuführen, die kleine Kinder leicht bewältigen können. Zum Beispiel wissen Menschen instinktiv, wie viel Kraft sie aufwenden müssen, um ein Ei anzuheben, aber für einen Roboter ist das ein Problem: zu wenig Kraft lässt das Objekt fallen, zu stark wird das Ei zerbrechen.
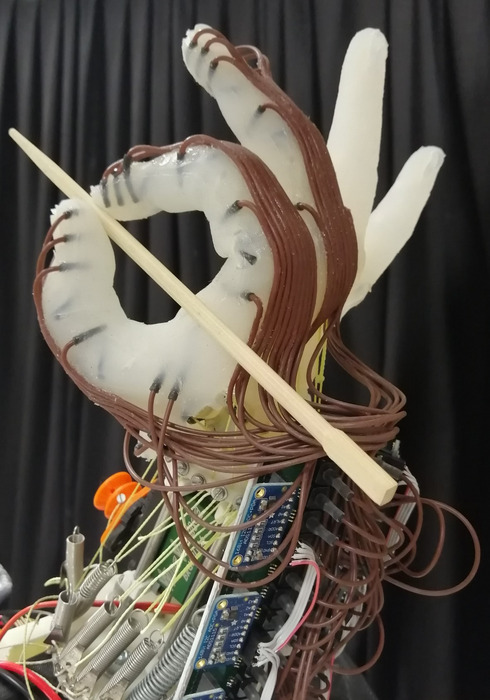 Prototyp eines Robotergreifers. Bild: Universität Cambridge
Prototyp eines Robotergreifers. Bild: Universität Cambridge
Ausgeklügelte Technik mit motorisierten Fingernerfordert eine beträchtliche Energiemenge und eine große Anzahl komplexer und teurer Stellglieder für jedes Gelenk. Der von den Ingenieuren vorgeschlagene passive Griff macht den Roboter viel einfacher zu steuern und viel energieeffizienter. Die Forscher glauben, dass ihr anpassungsfähiges Design verwendet werden könnte, um kostengünstige Robotik zu entwickeln, die zu natürlicheren Bewegungen in der Lage ist.
Weiter lesen:
Schauen Sie sich die Marskarte mit der höchsten Auflösung an: 110.000 Bilder und 5,7 Billionen Pixel
"Meer" von Quarks in einem Proton: Woraus besteht ein Elementarteilchen?
Neues Bild von Hubble verwirrt Wissenschaftler
Auf dem Cover: ein Prototyp eines Robotergreifers. Bild: Universität Cambridge