Forscher der University of Illinois in Urbana-Champaign und der Princeton University nutzten
Die Wissenschaftler verwendeten winzige SpiralenAktuatoren, die die Arbeit der Muskeln im Brustkorb des Schnellkäfers nachahmen. Ein künstlicher Aktuator zieht an einem winzigen Balken, wodurch sich der Roboter langsam biegt und elastische Energie speichert. Einmal freigesetzt, drückt diese Energie den Roboter nach oben.
Das haben Wissenschaftler in früheren Studien herausgefundenDer Schnellkäfer hat einen speziellen Spiralmuskel. Es speichert Energie und wird zum Beispiel ausgelöst, wenn sich ein Insekt auf den Rücken rollt. Unter der Wirkung einer scharfen Begradigung dieses Muskels wirft sich der Körper des Käfers auf eine große Höhe, die ein Vielfaches seiner Größe beträgt. Der gleiche Mechanismus funktioniert für Roboter.
Eine der größten Herausforderungen der Kleinrobotik besteht darin, ein Design zu finden, das klein, aber leistungsstark genug ist, um Hindernisse zu überwinden oder gefährliche Orte schnell zu verlassen.
Sameh Tawfiq, Forschungsleiter
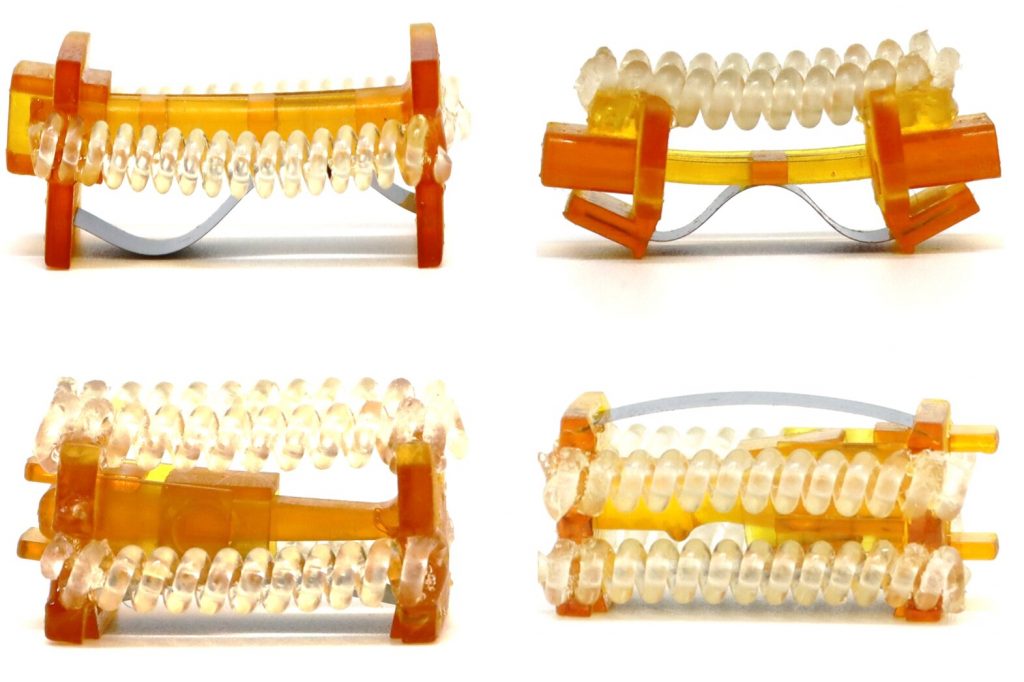 Von Forschern vorgeschlagene Varianten von Designs springender Roboter. Bild: University of Illinois Urbana-Champaign
Von Forschern vorgeschlagene Varianten von Designs springender Roboter. Bild: University of Illinois Urbana-Champaign
Wissenschaftler glauben, dass winzige Roboter dies tun werdenum an schwer zugängliche Orte zu gelangen, um bei der Wartung großer Maschinen wie Turbinen und Strahltriebwerke zu helfen, oder in der Landwirtschaft, um Anlagen zu inspizieren, z. B. durch Fotografieren, um Probleme zu identifizieren.
Weiter lesen:
Ein riesiger Sonnenfleck dreht sich zur Erde. Es ist mit bloßem Auge sichtbar
Sehen Sie, wie ein blattloses Flugzeug fliegt. Seine Geschwindigkeit übersteigt 900 km/h
Die Milchstraße ist ungewöhnlich groß für ihren galaktischen Faden
Auf dem Cover: eine künstlerische Illustration der Idee. Bild: Michael Vincent, University of Illinois Urbana-Champaign