Forscher am MIT haben einen Roboterarm mit hoher Geschwindigkeit entwickelt
Die Entwicklung basiert auf einem Roboterfinger mitein starres Skelett, das von einer weichen Außenschicht umgeben ist. Im Inneren des Fingers platzierten die Forscher mehrere hochauflösende GelSight-Sensoren, die unter einer transparenten Silikon-„Haut“ eingebettet waren, um Querschnittsbilder zu liefern. Sie nutzen eine Kamera und drei LEDs, um visuelle Informationen über die Form eines Objekts zu sammeln und so eine kontinuierliche Messung über die gesamte Länge des Fingers zu ermöglichen.
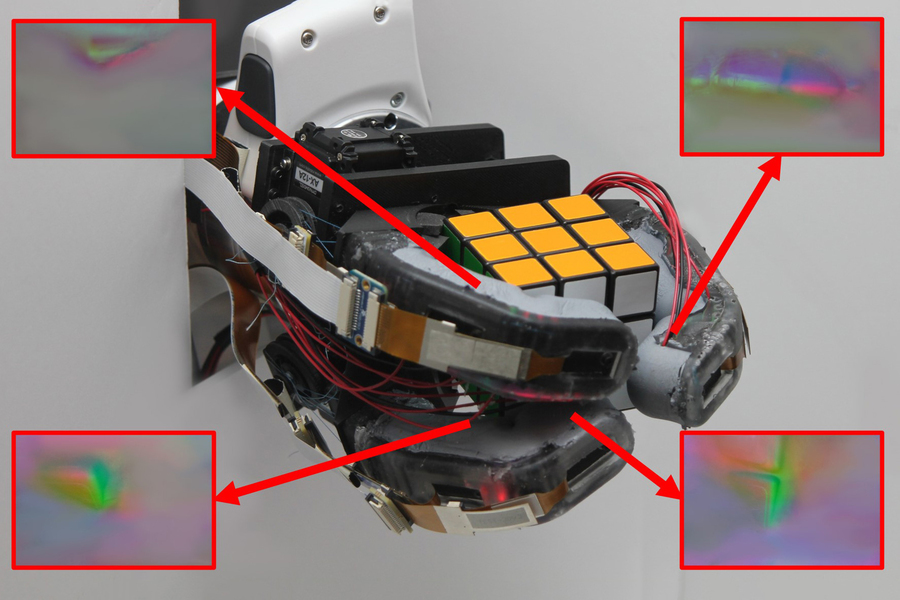 Jeder Finger hat zwei Cross-View-Kameras und sechs LEDs. Bild: MIT News
Jeder Finger hat zwei Cross-View-Kameras und sechs LEDs. Bild: MIT News
Wenn ein Finger ein Objekt ergreift, nimmt die Kamera aufBild, während farbige LEDs die Haut von innen beleuchten. Unter Verwendung der beleuchteten Konturen, die auf weicher Haut erscheinen, führt der Algorithmus inverse Berechnungen durch, um die Konturen auf der Oberfläche des erfassten Objekts abzubilden. Die Forscher trainierten ein maschinelles Lernmodell, um Objekte anhand von Rohbilddaten einer Kamera zu identifizieren.
Die meisten alternativen RoboterGreifer verwenden leistungsstarke Sensoren, die an den Fingerspitzen angebracht sind, stellen die Forscher fest. Daher muss ein Objekt in vollem Kontakt mit ihnen sein, um identifiziert zu werden. Andere Designs verwenden Sensoren mit geringerer Auflösung, die über den Finger verteilt sind, erfassen aber nicht so viele Details. Beide Optionen erfordern mehrere Erfassungen, um das Element zu analysieren.
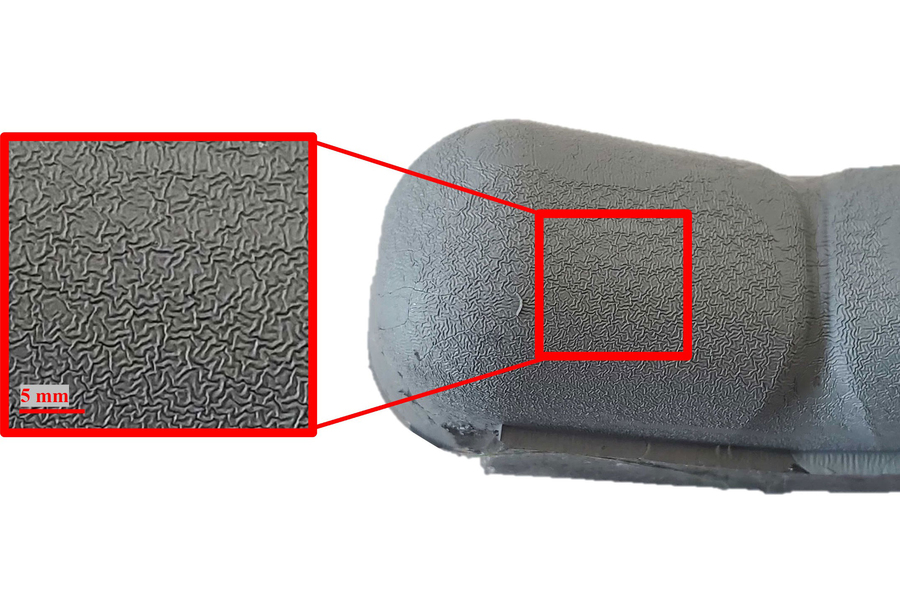 Winzige "Fältchen" auf der Oberfläche des Silikons helfen dem Finger, zur besseren Identifizierung über die Oberfläche des Objekts zu gleiten. Bild: MIT News
Winzige "Fältchen" auf der Oberfläche des Silikons helfen dem Finger, zur besseren Identifizierung über die Oberfläche des Objekts zu gleiten. Bild: MIT News
Die Studie zeigte, dass das neue GerätEine Erfassung reicht aus, um verschiedene Objekte mit einer Genauigkeit von bis zu 85 % zu identifizieren. Gleichzeitig macht das starre Skelett die Finger stark genug, um schwere Gegenstände wie einen Bohrer zu heben. Und mit weichem Leder können Sie biegsame Gegenstände wie eine leere Plastikwasserflasche sicher zusammendrücken, aber nicht quetschen.
Unser Ziel in dieser Arbeit war esvereinen alles, was unsere menschlichen Hände so gut macht, zu einem Roboterfinger, der Aufgaben erledigen kann, die andere Roboterfinger derzeit nicht bewältigen können.
Sandra Liu, Co-Autorin der Studie, MIT-Doktorandin
Weiter lesen:
Es stellte sich heraus, dass die Photosynthese nicht so funktioniert, wie Wissenschaftler dachten. Jetzt wollen sie es hacken
Entfernte Radiogalaxie stellte sich als schwarzes Loch heraus, das direkt auf die Erde gerichtet ist
Einen Weg gefunden, um Gewicht und Blutzucker zu reduzieren. Wissenschaftler versprechen die Wirkung einer Operation
Titelbild: MIT News