Professor Edward Anderson vom Massachusetts Institute of Technology und seine Doktorandin Sandra Liu
Der Griff besteht aus zwei flexiblen gerippten Fingern,die sich der Form des Objekts anpassen, mit dem sie in Kontakt kommen. Diese Finger werden, wie bei vielen ähnlichen Entwicklungen, aus flexiblen Kunststoffmaterialien auf einem 3D-Drucker hergestellt. Allerdings entfernten die Ingenieure bei ihrem Roboter die Querrippen, die sich an der Innenseite der Finger befinden und ihnen Steifigkeit verleihen. Stattdessen installierten die Forscher eine Kamera und Sensoren.
Eine dünneeine Acrylplatte, auf der „empfindliche“ Silikongel-Pads befestigt sind. Eine Kamera wird tief in der Kavität platziert, auf die Acrylschicht gerichtet und die gesamte Kavität wird von LEDs beleuchtet.
Beim Berühren eines Gegenstands umschließt der Finger ihn sanftes, verschmilzt mit den Konturen des Objekts. Die Kamera und spezielle Algorithmen analysieren die Veränderung von Silikon- und Acrylplatten. Basierend auf der Analyse bestimmt der Roboter die allgemeine Form des Objekts, Oberflächenunregelmäßigkeiten, die Ausrichtung des Objekts im Raum und die Kraft, mit der das Objekt zusammengedrückt werden muss.
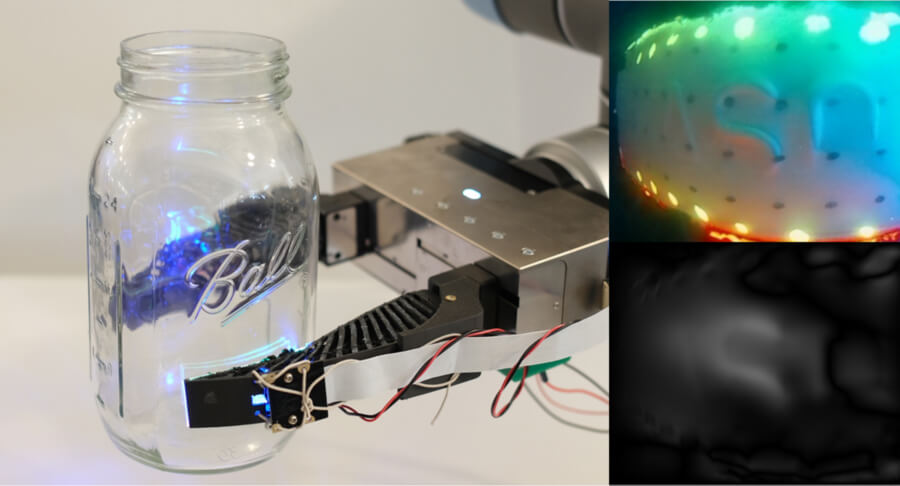
Die Forscher testeten ihreerfassen, indem Sie nur einen der beiden Finger berühren. Das Gerät, das sie erstellten, manipulierte erfolgreich verschiedene Objekte, wie einen Mini-Schraubendreher, eine Plastikerdbeere, eine Farbtube und ein Glas Wein. Gleichzeitig war der interne Sensor beim Einfangen von Erdbeeren in der Lage, die Körnigkeit ihrer Oberfläche erfolgreich zu erkennen, und beim Arbeiten mit einem Glas konnte er den eingravierten Namen lesen.
 Quelle: MIT Computer Science and Artificial Intelligence Laboratory
Quelle: MIT Computer Science and Artificial Intelligence Laboratory
Wie die Autoren der Arbeit anmerken, Glasobjektestellen aufgrund der Lichtbrechung eine Herausforderung für Computer-Vision-Sensoren dar. Mit taktilen Sensoren können Sie diese Einschränkung umgehen. Als der Griff das Glas anhob, spürte er die Ausrichtung des Stiels im Raum und konnte sich vergewissern, dass das Glas nach oben zeigte, bevor er es auf den Tisch senkte.
Ingenieure stellen fest, dass im Inneren ein Hohlraum entstehtFinger störte leicht die Stabilität des Griffs. Wissenschaftler planen, das Design ihres Geräts zu verfeinern, um diesen Mangel zu beheben. Außerdem wollen sie einen Drei-Finger-Griff entwickeln, der zum Beispiel Obststücke aufnehmen und deren Reife bewerten kann.
Weiter lesen:
MIT entwickelt eine stationäre Wärmekraftmaschine, die Turbinen übertrifft
Nach zehnjähriger Arbeit stellten Wissenschaftler das Standardmodell der Physik in Frage
Sehen Sie, wie der Sonnenaufgang auf dem Mars aussieht