Ingenieure entwickeln einen Roboterarm, der vom Rover vom Mars gesammelte Proben sammeln soll.
Die Architektur des Manipulators ist dem Menschen nachempfundenArm mit Schulter, Ellbogen und Handgelenk. Darüber hinaus hat der Roboter ein eigenes eingebautes „Gehirn“ und „Augen“. Die ESA berichtet, dass der Arm mit sieben Freiheitsgraden einen großen Bewegungsbereich ausführen kann. Ein hohes Maß an Geschicklichkeit ermöglicht es der Hand, die Röhren aus dem Rover zu entfernen, sie aus dem Marsboden zu heben, sie in den Behälter einzusetzen und den Deckel zu schließen, bevor sie vom Mars starten.
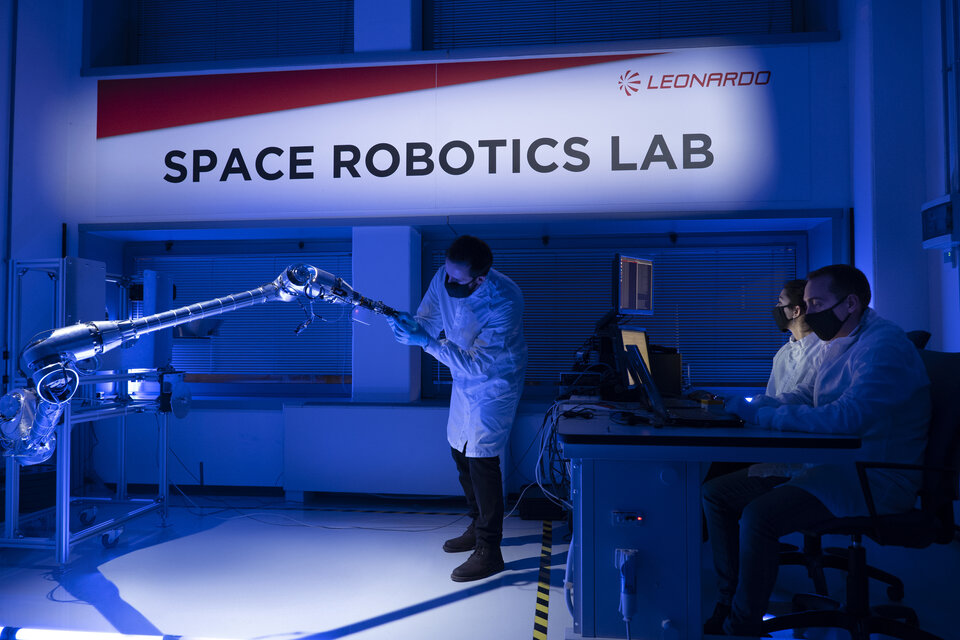 Roboterarm für die Marsmission. Foto: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Roboterarm für die Marsmission. Foto: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Der Roboter wird mit zwei Kameras und mehreren Sensoren ausgestattet sein. Mit diesen Geräten wird er in der Lage sein, selbstständig die beste Vorgehensweise zu bestimmen und Bewegungen entsprechend zu koordinieren.
Der Roboterarm ist Teil der Mission Mars Sample Return. Es besteht aus drei Teilen und soll bis 2033 auf dem Roten Planeten gesammelte Proben zur Erde bringen.
 Schema der Mission Mars Sample Return. Bild: EKA
Schema der Mission Mars Sample Return. Bild: EKA
Nachdem der Rover die erforderlichen Proben gesammelt hat,Er wird zur Startrampe zurückkehren. Mit Hilfe eines Manipulators wird die gesammelte Erde in einen Container geladen und hermetisch verschlossen. Der Roboter schließt den Deckel des Behälters und die Marsproben werden in die Umlaufbahn geschossen. Dort werden sie vom ESA Earth Return Orbiter (ERO) abgeholt, der das Material zurück zur Erde bringt.
Titelbild: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Weiter lesen:
Physiker haben eine universelle "Uhr" im Weltraum gefunden: Sie ist genauer als atomar
Archäologen haben Zeichnungen von gruseligen Menschen mit riesigen Köpfen gefunden: wer sie waren
Das James-Webb-Teleskop hat das erste Bild von Jupiter gemacht: Es hat 9 sich bewegende Ziele gleichzeitig