Ein Flugzeugtriebwerk ist ein Labyrinth aus sich windenden, rotierenden Rohren, durch die Flüssigkeiten und Gase transportiert werden
Ihre Erfindung ist der mechanische RegenSchnecken mit „Muskeln“ aus dielektrischen Elastomeraktoren und „Beinen“ aus Kohlefaserverbundwerkstoffen. Die Entwicklung wird ausführlich in einem Artikel beschrieben, der in der Fachzeitschrift Science Robotics veröffentlicht wurde.
Bestehende Methoden zur Überprüfung der LuftfahrtMotoren sind zeitaufwändig und erfordern hochqualifizierte Ingenieure. Wir hoffen, dass Roboter diese Art von Arbeit erledigen, um Zeit und Aufwand zu sparen.
Huichang Zhao, einer der Co-Autoren der Studie, in einem Interview mit IE
Dies ist nicht der erste Roboter, der für Inspektionen entwickelt wurdeRohre im Zentimeter- und Millimetermaßstab. Andere Konstruktionen verwenden Räder oder andere Mittel, um sich in geschlossenen Räumen zu bewegen. Diese Lösungen sind jedoch nicht immer praktikabel, sagen die Autoren des neuen Werks. Ein Grund dafür sind die Bedingungen in Verschiedene Rohrleitungen können selbst innerhalb desselben Motors stark variieren. Diese Konstruktionen können auch Schwierigkeiten haben, zwei gleichermaßen wichtige Aufgaben für diesen Robotertyp zu erfüllen: Fortbewegung und Inspektion.
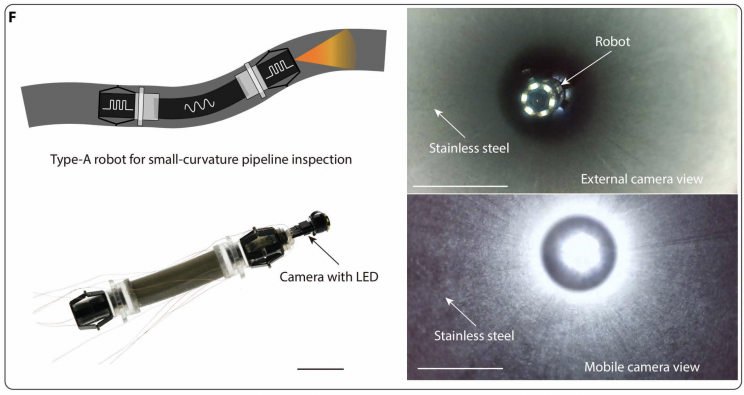 Bilder eines Roboters mit einer Frontkamera und eines Roboters, der die Umgebung in einem Edelstahlrohr überwacht.
Bilder eines Roboters mit einer Frontkamera und eines Roboters, der die Umgebung in einem Edelstahlrohr überwacht.
Quelle
Um diese Einschränkungen zu mildern, müssen Ingenieureinspiriert von pneumatisch angetriebenen Robotern, die sich mithilfe von Druckluft über ihre gesamte Länge bewegen und wie Würmer kriechen. Sie lassen sich leichter abdichten und auf kleine Größen schrumpfen, da sie keine komplexen Vorsprünge wie Räder oder Beine haben. Diese Roboter neigen dazu, langsam zu sein.
Neues Design ermöglicht BewegungGanz anders. Statt mit Druckluft bewegt sich das regenwurmartige Gerät mit elektrischen Ladungen in Wellen durch das Rohr.
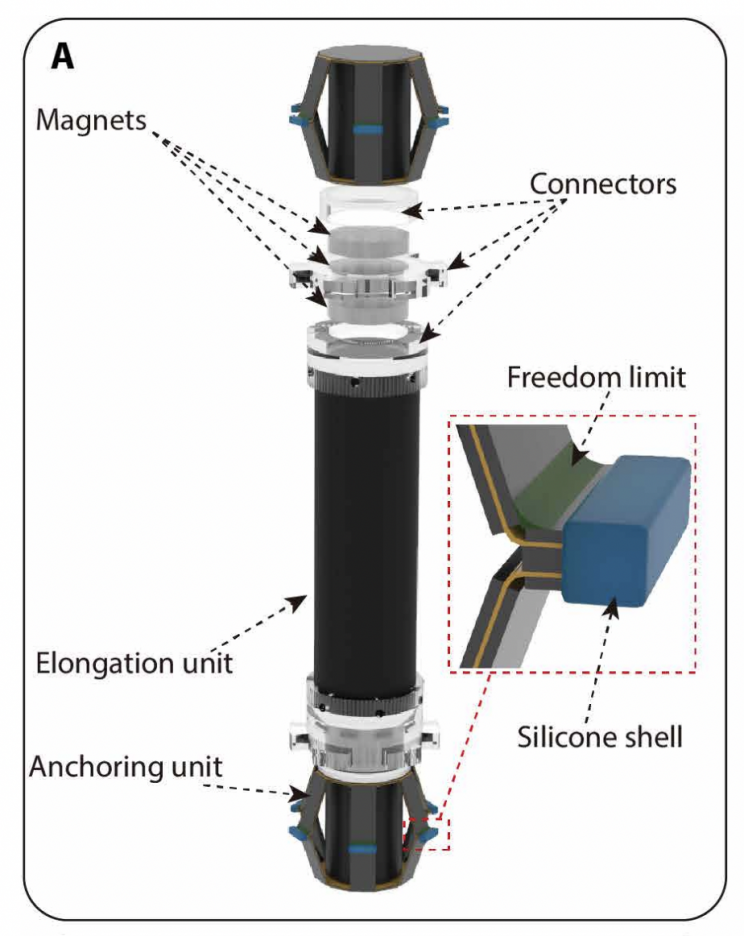 Schematische Darstellung des Roboters.
Schematische Darstellung des Roboters.
Quelle
Die Schlüsseltechnologie des Roboters sind künstliche Muskeln,auch bekannt als Soft-Aktuatoren oder dielektrische Elastomer-Aktuatoren. Sie sind leistungsstark und klein genug, um den Roboter schnell in einem Rohr bewegen zu können. Durch die Ladungen ziehen sich die Aktuatoren schnell zusammen, sodass sich die 47 mm lange Maschine mit einer Geschwindigkeit von einer Körperlänge pro Sekunde bewegen kann. Der Roboter besteht aus Segmenten, die mithilfe von Magneten zusammengefügt werden können, sodass der Bediener die genaue Einstellung anpassen kann Design abhängig von der Spezifikation der zu prüfenden Linie.
„Wir können einen solchen Roboter in einen Flugzeugtriebwerksförderer einbauen und ihn über seine gesamte Länge bewegen lassen, wobei er Bilder entlang des Weges sendet“, schlussfolgern die Wissenschaftler.
weiter lesen
Gravitation und Dunkle Materie existieren nicht: Hauptsache an der neuen Arbeit der Physiker
Etwas Seltsames passiert im Universum: Wie lassen sich Widersprüchlichkeiten in der Hubble-Konstante erklären?
Warum wollen sie eigentlich das Bologna-Bildungssystem in Russland abschaffen?