Μηχανικοί από το Πανεπιστήμιο του Κέιμπριτζ ανέπτυξαν ένα μαλακό ρομποτικό χέρι τυπωμένο
Οι ερευνητές χρησιμοποίησαν έντυπαΈνα ανθρωπόμορφο χέρι εμφυτεύεται με απτικούς αισθητήρες σε τρισδιάστατο εκτυπωτή ώστε το χέρι να μπορεί να «νιώσει» αυτό που αγγίζει. Το χέρι ήταν ικανό μόνο για παθητική κίνηση με βάση τον καρπό. «Το μεγάλο πλεονέκτημα αυτού του σχεδιασμού είναι το εύρος κίνησης που μπορούμε να έχουμε χωρίς να χρησιμοποιήσουμε κανέναν ενεργοποιητή», λένε οι συγγραφείς.
Εκπαίδευση ενός «παθητικού» ρομποτικού βραχίονα. Βίντεο: Πανεπιστήμιο του Κέιμπριτζ
Οι επιστήμονες πραγματοποίησαν περισσότερες από 1.200 δοκιμές με βραχίονα ρομπότ,παρακολουθώντας την ικανότητά της να αρπάζει μικρά αντικείμενα χωρίς να τα ρίχνει. Αρχικά, το ρομπότ εκπαιδεύτηκε χρησιμοποιώντας μικρές 3D εκτυπωμένες πλαστικές μπάλες και τις έπιασε χρησιμοποιώντας προκαθορισμένες ενέργειες που προέρχονται από ανθρώπινες επιδείξεις.
Το ρομπότ χρησιμοποίησε δοκιμή και σφάλμα για ναμάθετε ποια λήψη θα είναι επιτυχής. Αφού ολοκλήρωσε την εξάσκησή του με την μπάλα, προσπάθησε να αρπάξει διάφορα αντικείμενα, όπως ένα ροδάκινο, ένα ποντίκι υπολογιστή και ένα ρολό με φούσκα. Σε αυτές τις δοκιμές, το χέρι μπόρεσε να πιάσει με επιτυχία 11 από τα 14 αντικείμενα.
Λήψη αντικειμένων διαφορετικών μεγεθών, σχημάτων και υφών- μια εργασία που είναι απλή για ένα άτομο, αλλά δύσκολη για ένα ρομπότ. Τα περισσότερα από τα σημερινά προηγμένα ρομπότ δεν είναι ικανά να εκτελούν χειριστικές εργασίες που μπορούν εύκολα να χειριστούν τα μικρά παιδιά. Για παράδειγμα, οι άνθρωποι γνωρίζουν ενστικτωδώς πόση δύναμη πρέπει να εφαρμόσουν για να σηκώσουν ένα αυγό, αλλά για ένα ρομπότ αυτό είναι πρόβλημα: αν δεν είναι αρκετά ισχυρό θα προκαλέσει πτώση του αντικειμένου, πολύ δυνατό θα σπάσει το αυγό.
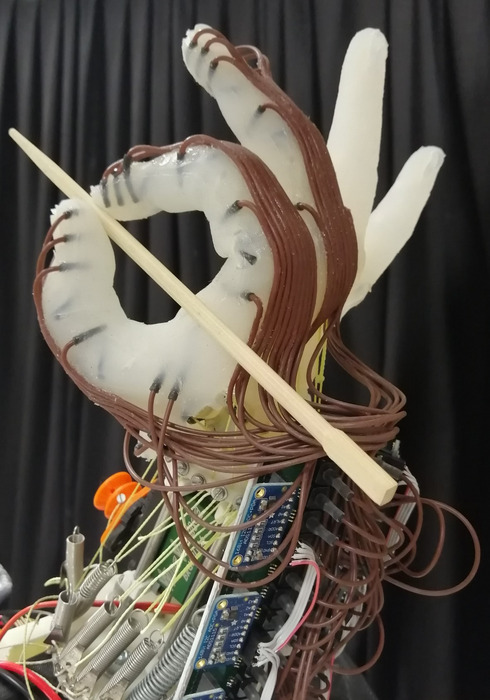 Πρωτότυπο ρομποτικής λαβής. Εικόνα: Πανεπιστήμιο του Κέμπριτζ
Πρωτότυπο ρομποτικής λαβής. Εικόνα: Πανεπιστήμιο του Κέμπριτζ
Προηγμένη τεχνολογία με μηχανοκίνητα δάχτυλααπαιτεί σημαντική ποσότητα ενέργειας και μεγάλο αριθμό πολύπλοκων και ακριβών ενεργοποιητών για κάθε άρθρωση. Η παθητική λαβή που προτείνεται από τους μηχανικούς κάνει το ρομπότ πολύ πιο εύκολο στον έλεγχο και πολύ πιο ενεργειακά αποδοτικό. Οι ερευνητές πιστεύουν ότι ο προσαρμόσιμος σχεδιασμός τους θα μπορούσε να χρησιμοποιηθεί για την ανάπτυξη ρομποτικής χαμηλού κόστους ικανή για πιο φυσικές κινήσεις.
Διαβάστε περισσότερα:
Δείτε τον χάρτη με την υψηλότερη ανάλυση του Άρη: 110.000 καρέ και 5,7 τρισεκατομμύρια pixel
«Θάλασσα» κουάρκ μέσα σε ένα πρωτόνιο: από τι αποτελείται ένα στοιχειώδες σωματίδιο
Νέα εικόνα του Χαμπλ μπέρδεψε τους επιστήμονες
Στο εξώφυλλο: μια πρωτότυπη ρομποτική λαβή. Εικόνα: Πανεπιστήμιο του Κέμπριτζ