Ingenieros de la Universidad de Cambridge han desarrollado una suave mano robótica impresa en
Los investigadores utilizaron impresosUna mano antropomórfica implantada con sensores táctiles en una impresora 3D para que la mano pueda “sentir” lo que toca. La mano solo era capaz de movimiento pasivo basado en la muñeca. “La gran ventaja de este diseño es el rango de movimiento que podemos obtener sin usar actuadores”, dicen los autores.
Entrenando un brazo robótico "pasivo". Vídeo: Universidad de Cambridge
Los científicos realizaron más de 1200 pruebas con un brazo robótico,observando su habilidad para agarrar objetos pequeños sin dejarlos caer. Inicialmente, el robot fue entrenado usando pequeñas bolas de plástico impresas en 3D y las agarró usando acciones predeterminadas derivadas de demostraciones humanas.
El robot usó prueba y error paraaveriguar qué captura tendrá éxito. Después de terminar su práctica con la pelota, trató de agarrar varios objetos, incluido un melocotón, un mouse de computadora y un rollo de plástico de burbujas. En estas pruebas, la mano pudo agarrar con éxito 11 de 14 objetos.
Captura de objetos de diferentes tamaños, formas y texturas.- una tarea que es simple para una persona, pero difícil para un robot. La mayoría de los robots avanzados de hoy en día no son capaces de realizar tareas de manipulación que los niños pequeños puedan manejar fácilmente. Por ejemplo, las personas saben instintivamente cuánta fuerza aplicar para levantar un huevo, pero para un robot esto es un problema: si no es lo suficientemente fuerte, el objeto se caerá, si es demasiado fuerte, el huevo se romperá.
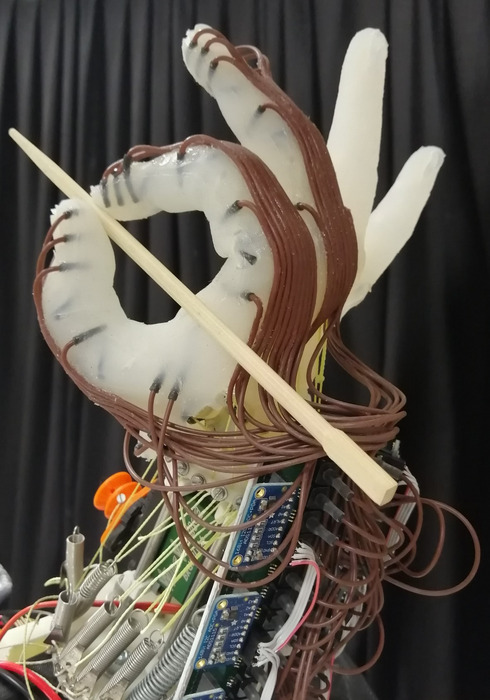 Prototipo de pinza robótica. Imagen: Universidad de Cambridge
Prototipo de pinza robótica. Imagen: Universidad de Cambridge
Tecnología sofisticada con dedos motorizadosrequiere una cantidad significativa de energía y una gran cantidad de actuadores complejos y costosos para cada articulación. El agarre pasivo propuesto por los ingenieros hace que el robot sea mucho más fácil de controlar y mucho más eficiente energéticamente. Los investigadores creen que su diseño adaptable podría usarse para desarrollar robótica de bajo costo capaz de movimientos más naturales.
Lee mas:
Mira el mapa de Marte de mayor resolución: 110.000 fotogramas y 5,7 billones de píxeles
"Mar" de quarks dentro de un protón: en qué consiste una partícula elemental
Nueva imagen del Hubble desconcertó a los científicos
En la portada: un prototipo de pinza robótica. Imagen: Universidad de Cambridge