Investigadores del Instituto Italiano de Tecnología han presentado un prototipo de robot de tres patas que
La plataforma robótica MARM consta decuerpo central, tres extremidades y un dispositivo de acoplamiento especial. Este último se utiliza para cargar el dispositivo e intercambiar datos. Al crear un robot, los científicos han previsto la posibilidad de trabajar tanto en presencia de gravedad como en microgravedad.
Robot MARM. Vídeo: IIT
El robot MARM puede usar tres extremidades paramovimiento agarrando las interconexiones estándar en las superficies de la estación y arrastrándose sobre ellas. También puede ensamblar y posicionar varios componentes del dispositivo, como mover e instalar las placas hexagonales modulares de 1,2 m de ancho que se usan en la ISS y manipular complementos orbitales.

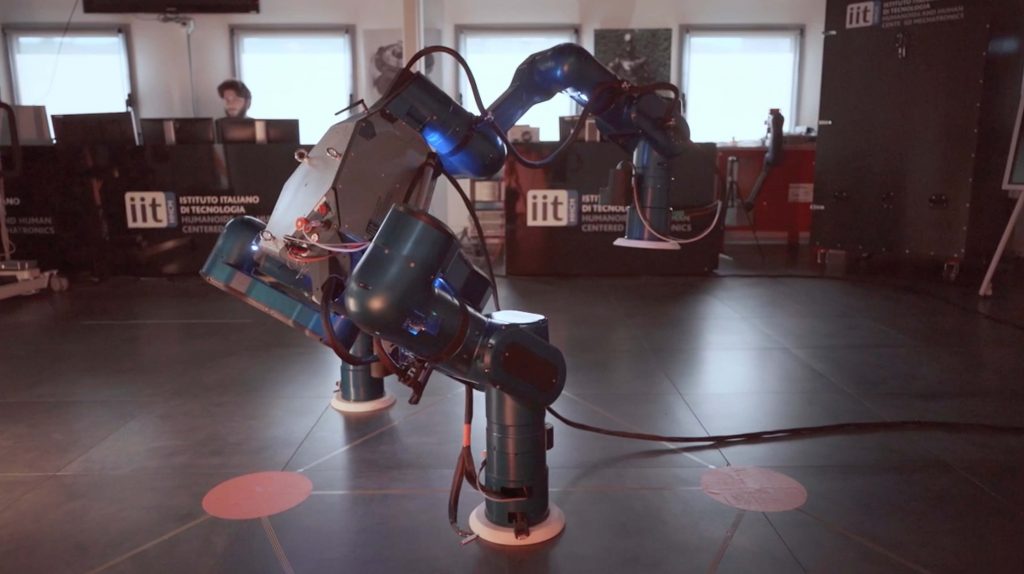
Robot MARM. Fotos: IIT
Configuración de tres extremidades: básicala diferencia entre el nuevo robot y los desarrollos anteriores. Esto, según los ingenieros, proporciona una mayor flexibilidad en el funcionamiento del dispositivo. Por ejemplo, puede usar dos "manos" para trabajar, aferrándose a la superficie con la ayuda de la restante.
Los investigadores sugieren usar MARM pararecoja mercancías del almacén, muévalas al lugar correcto, recójalas y colóquelas. El prototipo se probará en microgravedad teniendo en cuenta este escenario, después de lo cual se creará una versión funcional para enviar a la ISS.
Lee mas:
Científicos de la zona de permafrost: cómo desarrollan ropa inteligente y una vacuna contra el cáncer
Se han encontrado dos planetas no lejos de la Tierra. Tal vez estén habitados
Los científicos han descubierto quién se benefició de la muerte de los dinosaurios