Trabajar en un problema real permitió a los estudiantes adquirir experiencia práctica durante sus estudios y
Por qué decidimos asumir este desafío
En promedio, cada año se amputan extremidades en el mundo.1 millón de personas, y eso sin contar a los que ya nacieron sin brazos ni piernas. No todos tienen acceso a buenas prótesis, pero incluso con las más avanzadas es difícil lograr una total naturalidad de movimiento.
¿Cómo funcionan las prótesis biónicas y cómo puede ayudar la inteligencia artificial?
El principio básico de funcionamiento de la mayoría de las prótesis esse trata de una lectura del potencial electromiográfico de los músculos o, más simplemente, de su tensión. En el manguito donde se inserta el muñón (la parte de la extremidad que queda después de la amputación o debido a su subdesarrollo (aplasia) - ed.), se instalan dos sensores, uno es responsable de abrir la mano y el otro de cerrar. El usuario tensa el músculo y se activa el gesto.
Las prótesis biónicas se dividen en dos tipos:agarre único: puede comprimir/aflojar el cepillo. Multi-agarre más complejo, además de este gesto básico, realiza movimientos programables "únicos", porque cada dedo se puede mover por separado. Entonces, por ejemplo, funciona la prótesis biónica Manifesto, que en términos de diseño no es inferior a los últimos modelos de Boston Dynamics.
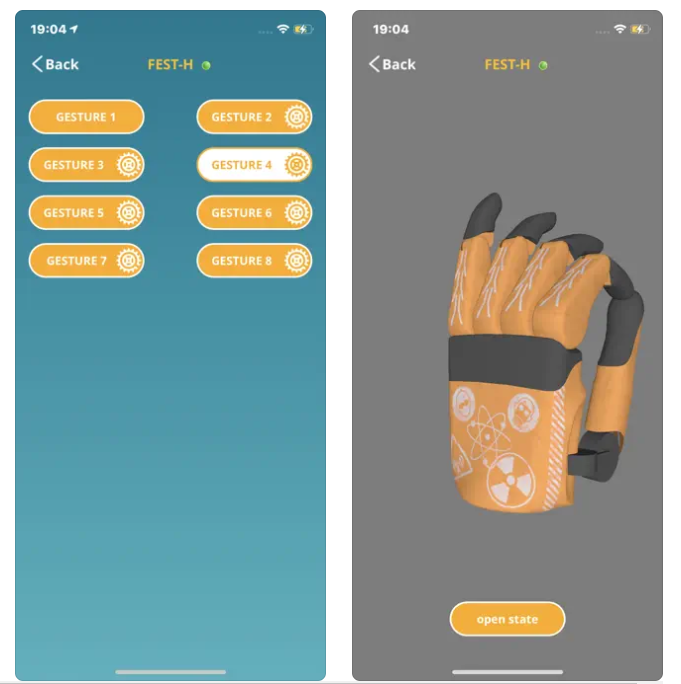 El gesto está programado sobre el modelo 3D del "arrastrar y soltar" de los dedos de la mano (como si estuvieras girando un personaje de videojuego en el menú). Guardar y cambiar en un clic.
El gesto está programado sobre el modelo 3D del "arrastrar y soltar" de los dedos de la mano (como si estuvieras girando un personaje de videojuego en el menú). Guardar y cambiar en un clic.
Por ejemplo:


Козу 🤟🏻 или Сердечко ❤️
Однако остается проблема: чтобы выполнить жест, нужно сначала запрограммировать это, если его нет в быстром доступе, затем переключить жест (можно сделать через приложение в смартфоне или долгое удержание напряжения на датчике) и, наконец, открыть или закрыть жест путем напряжения мышцы.
То есть, помимо самого жеста, приходится выполнять довольно много дополнительных действий.


Бионический протез Manifesto — платформа для обучения ИИ
Поэтому, чтобы делать жесты без подготовки и сразу распознавать их как можно точнее, исследователи решили обратиться к искусственному интеллекту, а точнее — к ИИ-моделям, которые обучаются под каждого пользователя на его персональных данных.
Для более эффективной работы нейросети нужно иметь больше входных данных. «Моторика» разработала оптомиографические датчики, которые, в отличие от стандартных электромиографических, различают изменения не только в мышцах, но и в сухожилиях, суставах, кровотоках и коже. Широкий диапазон данных повышает точность, плавность и дает возможность использовать протез людям со слабым сигналом от мышц или вообще с его отсутствием. ИИ изучает, какие изменения показателей сопряжены с тем или иным жестом, и воспроизводит его, двигая микродвигателями нужных пальцев. Такая технологическая связка уже сейчас позволяет протезам выполнять определенные жесты.
Студенты, принимавшие участие в хакатоне, должны были усовершенствовать прототип ИИ-модели для системы управления протеза руки.
Как выглядел процесс хакатона
Участвовать в хакатоне могли все студенты и выпускники курса Data Science, которые отправили онлайн-заявку и обладали нужными навыками: это операции над массивами данных, навыки анализа данных, разведывательного анализа, построения моделей классификации и другие.
Всего было выбрано 44 участника, которых разбили на 8 команд по 3–6 человек: так, чтобы каждая была равносильна другим по опыту и навыкам ее членов. Участники команды самостоятельно распределяли роли внутри: тимлид, разработчик или проджект-менеджер.
У московских студентов была возможность приехать в лабораторию «Моторики» в Сколково, чтобы самостоятельно поучаствовать в процессе сбора данных с реального протеза. Выглядело это так: на руку участника устанавливали оптомиографические датчики, контроллер которых подключали к протезу. Затем протез делал серию жестов: открытая ладонь ✋, полный хват ✊, жест «пистолет» 👉, жест «ОК» 👌 и другие (всего их было 15), а пользователь их воспроизводил. Показания датчиков и жест, который выполнял пользователь в этот момент, фиксировались для каждого промежутка времени. Затем они оцифровывались в наборы данных, которые студенты использовали для решения задачи.
Задача заключалась в том, чтобы с использованием методов Data Science построить модели, которые по показаниям датчиков будут определять жесты, выполняемые пользователем.
Работа велась в формате трехэтапного хакатона: от простой задачи к сложной для плавного погружения в предметную область. Мы решили, что сперва дадим студентам общую картину, а потом постепенно будем усложнять постановку задачи. Третья уже была максимально приближена к «боевой».
После каждого этапа команды показывали свои решения, из которых мы отмечали лучшие. В процессе хакатона участники могли обращаться к нам — менторам — за консультациями. Мы также отвечали за разработку задач и критериев для оценки результатов. По окончании каждого этапа студенты получали от нас фидбэк, насколько их решение было актуальным и эффективным, а также комментарии относительно структуры кода и технических ошибок, связанных с машинным обучением.
Три этапа хакатона
В начале работы студенты получили данные и базовую модель как некий ориентир. Идея хакатона заключалась в том, чтобы команды улучшили результат базовой модели или приблизились к нему. Так мы хотели проверить, можно ли вообще улучшить нашу базовую модель.
На первом этапе командам нужно было классифицировать жесты по участку данных, то есть определить, из какого жеста в какой произошел переход.
Например, был совершен переход из нейтрального положения (открытая ладонь) в один из жестов и наоборот — из жеста в нейтральное положение. Нужно было обучить модель распознавать, какой был выполнен жест: сгиб/разгиб каждого пальца, жест «ОК» 👌🏻 и «пистолет» 👉🏻 и так далее.
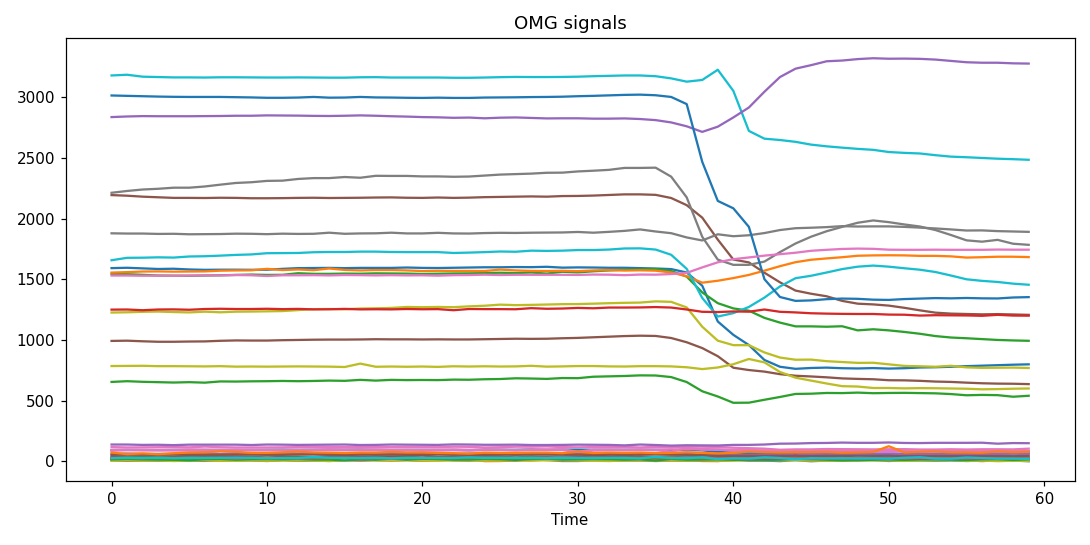 Фрагмент датасета для первой задачи
Фрагмент датасета для первой задачи
На втором этапе требовалось классифицировать жест и определять его начало и окончание во времени. В итоге должна была получиться модель, которая распознает, как, в какой последовательности и с каким временным интервалом рука переходит от одного жеста к другому.
 Фрагмент датасета для второй задачи
Фрагмент датасета для второй задачи
Если в первой задаче во всем исследуемом временном промежутке случился жест, то во второй задаче мы хотели, чтобы участники в каждый момент времени определили, какой выполнялся жест. Например, большой палец сгибался в течение определенного временного отрезка, а потом произошел переход к жесту открытой ладони.
На третьем этапе было необходимо сегментировать непрерывную запись на отдельные жесты с определением их начала и окончания во времени.
Задача качественно усложнилась. Теперь участники работали не с подготовленными наборами данных, а непрерывными сырыми данными. Требовалось самостоятельно разработать систему работы с ними: как их извлечь и как нарезать, чтобы потом обучать модели.
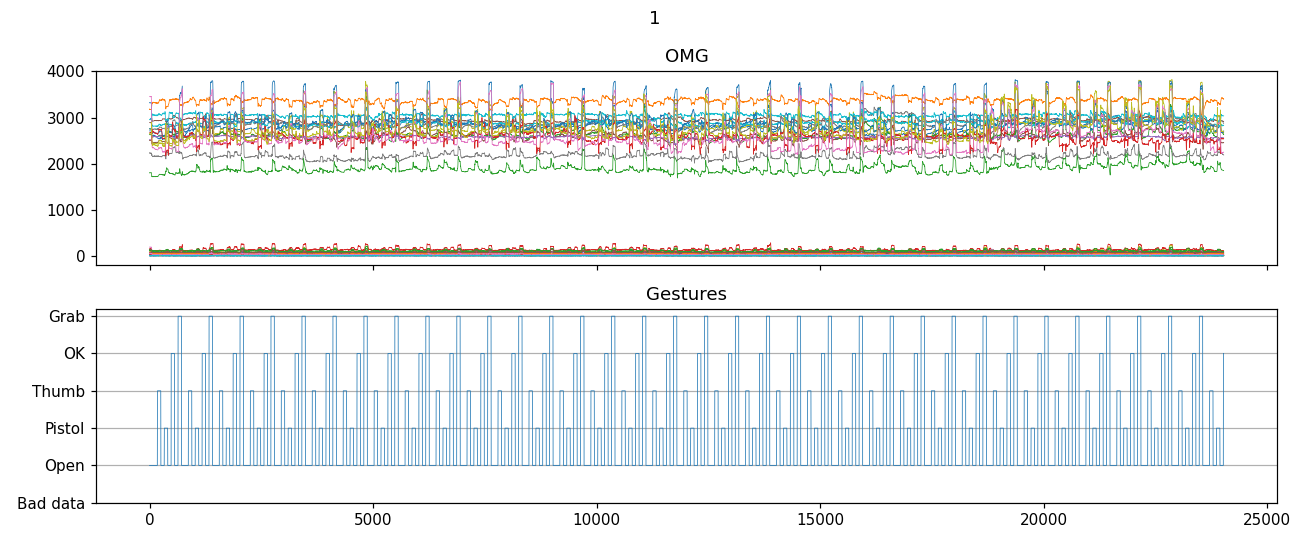 Фрагмент датасета для третьей задачи
Фрагмент датасета для третьей задачи
В первой и второй задачах мы брали один участок времени, то есть переход из одного жеста в другой, не больше. Но в реальности наша рука постоянно меняет свое положение, это происходит непрерывно, а не только в определенный промежуток времени. Мы переходим из одного жеста в другой, потом из этого жеста в третий, и так далее. И третья задача состояла в том, чтобы зафиксировать момент каждого перехода из одного жеста в другой и понять, в какой жест произошел переход, при этом жестов могло быть сколько угодно много.
Какие были результаты
Мы проводили хакатон с помощью платформы Kaggle. Решение проверялось алгоритмом, который оценивал качество построенной модели и ранжировал модели по степени точности, определяя результаты команд.

Результаты оценивались по стандартной для машинного обучения метрике F1-score: то есть по сочетанию полноты и точности полученных данных, для второй и третьей задачи метрика рассчитывалась для каждого момента времени.
Идеальным считалось решение, качество которого по метрике F1-score было максимально приближено к 1. У большинства участников по первым двум задачам метрика была близка к 1, они строили достаточно результативные модели, однако фактический потолок в рамках третьей задачи составлял всего 0,7.
При оценке работ мы учитывали и то, какой подход применяли студенты: насколько он отличался от базового алгоритма «Моторики», были ли найдены какие-то интересные закономерности, было ли решение универсальным с точки зрения потребляемых ресурсов, куда относятся используемая для решения оперативная память и скорость вычислительной мощности. Можно построить такую тяжеловесную модель, которая будет предсказывать идеально, но будет делать это в течение нескольких минут. Для человека с ампутированной рукой, носящего протез, ждать несколько минут, пока у него один палец начнет двигаться, совсем не оптимально. Система должна работать буквально в режиме реального времени с задержкой не более 100 мс.
По итогам хакатона практически все команды приблизили свой результат к базовой модели разработчиков и предложили некоторые интересные подходы. Модели, построенные участниками на первом и втором этапах, были результативными и хорошо работали в заданных условиях, помогли погрузиться в предметную область. В дальнейшем их будут тестировать в реальной ситуации. В третьей задаче участники предложили обновленные подходы к обработке данных перед тем, как отправлять их в модель, но эти гипотезы также нужно проанализировать и проверить. Если испытания пройдут успешно, полученные результаты могут быть использованы в дальнейшей работе.
Какие выводы мы сделали
Хакатон — это отличный пример того, как онлайн-школа движется от формата EdTech к ExperienceTech, когда теоретические знания обязательно дополняются практическими задачами от игроков рынка. Бизнес смог делегировать свои реальные задачи студентам и получить несколько новых интересных подходов, которые могут войти в релизную версию. Бизнес также получает потенциальных кандидатов, которые в процессе обучения погружаются в задачи индустрии.
Студенты отметили, что постепенное усложнение задач упростило переход от теоретической модели к реальной. Это позволило лучше погрузиться в проблему даже тем, у кого мало опыта в написании кода. Тем, кто раньше имел дело только с классическими моделями машинного обучения, было особенно интересно познакомиться с современными наработками в области глубокого обучения.
По окончании первого этапа мы увидели, что многим участникам не хватает навыков презентации результатов. Поэтому ввели дополнительный критерий оценки работ (культура кода), который включал в себя оформление кода по стандартам, документирование, следование правилам визуализации и текстовое сопровождение хода решения.
Из-за внешних обстоятельств время хакатона увеличилось с одного до двух месяцев, и мотивация некоторых участников снизилась, а другие вовсе вышли из проекта. В будущем мы постараемся оптимизировать время хакатона и рассчитывать его длительность более внимательно, чтобы сохранить высокий уровень вовлеченности и уделить больше внимания мотивации участника на каждом этапе.
Lee mas:
Científicos de la zona de permafrost: cómo desarrollan ropa inteligente y una vacuna contra el cáncer
Los científicos “engañaron” al tiempo y enviaron un fotón al pasado: cómo este avance cambiará la física
10 hechos científicos que resultaron ser falsos. Tarjetas