Investigadores de la Universidad de Illinois en Urbana-Champaign y la Universidad de Princeton utilizaron
Los científicos usaron diminutas espiralesactuadores que imitan el trabajo de los músculos en el tórax del escarabajo clic. Un actuador artificial tira de un haz diminuto, lo que hace que el robot se flexione lentamente y almacene energía elástica. Una vez liberada, esta energía empuja al robot hacia arriba.
En estudios previos, los científicos han encontrado queel escarabajo clic tiene un músculo espiral especial. Almacena energía y se activa, por ejemplo, cuando un insecto rueda sobre su espalda. Bajo la acción de un enderezamiento brusco de este músculo, el cuerpo del escarabajo se eleva a una gran altura, varias veces su tamaño. El mismo mecanismo funciona para los robots.
Uno de los principales desafíos de la robótica a pequeña escala es encontrar un diseño que sea pequeño pero lo suficientemente potente como para superar obstáculos o salir rápidamente de lugares peligrosos.
Sameh Tawfiq, Jefe de Investigación
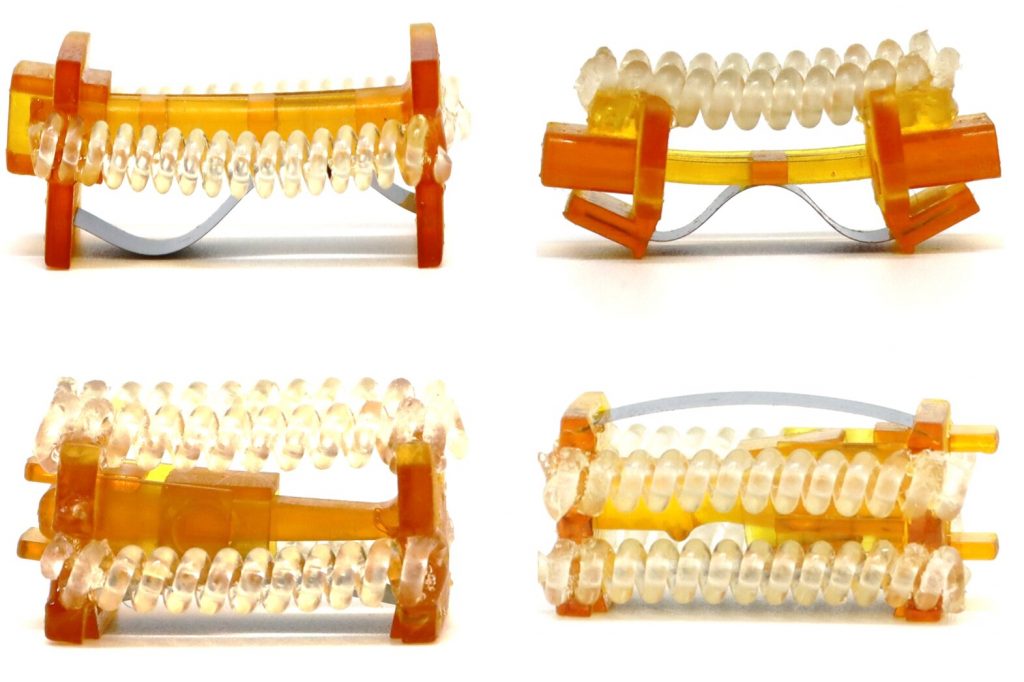 Variantes de diseños de robots saltadores propuestos por investigadores. Imagen: Universidad de Illinois Urbana-Champaign
Variantes de diseños de robots saltadores propuestos por investigadores. Imagen: Universidad de Illinois Urbana-Champaign
Los científicos creen que los pequeños robotspara llegar a lugares de difícil acceso para ayudar a realizar el mantenimiento de máquinas grandes como turbinas y motores a reacción, o en agricultura para inspeccionar plantas, como tomar fotografías para identificar problemas.
Lee mas:
Una mancha solar gigante gira hacia la Tierra. Es visible a simple vista
Mira cómo vuela un avión sin aspas. Su velocidad supera los 900 km/h
La Vía Láctea es anormalmente grande para su filamento galáctico
En la portada: una ilustración artística de la idea. Imagen: Michael Vincent, Universidad de Illinois Urbana-Champaign