El profesor Edward Anderson del Instituto Tecnológico de Massachusetts y su estudiante de posgrado Sandra Liu
La empuñadura consta de dos dedos acanalados flexibles,que se adaptan a la forma del objeto con el que están en contacto. Estos dedos, como en muchos desarrollos similares, están hechos de materiales plásticos flexibles en una impresora 3D. Sin embargo, en su robot, los ingenieros quitaron las costillas transversales ubicadas en el interior de los dedos y les dieron rigidez. En cambio, los investigadores instalaron una cámara y sensores.
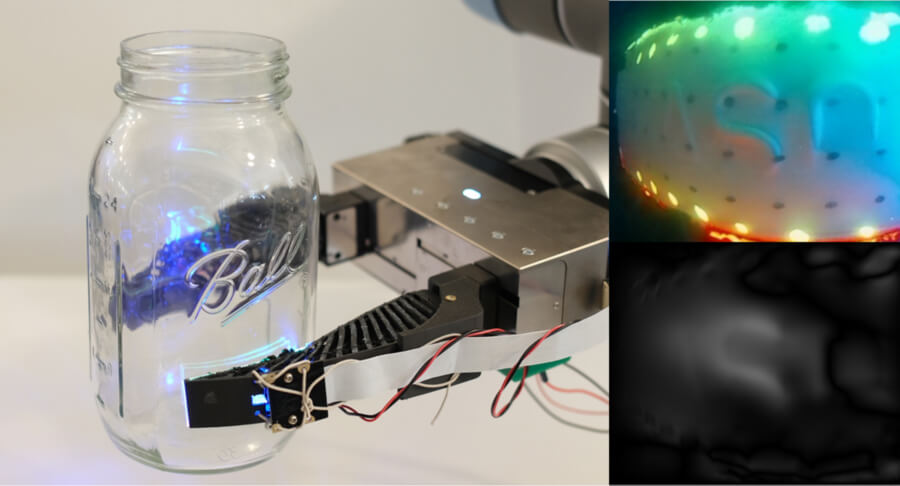
Una delgadauna lámina acrílica a la que se unen almohadillas de gel de silicona "sensibles". Se coloca una cámara en lo profundo de la cavidad, dirigida hacia la capa acrílica, y toda la cavidad se ilumina mediante LED.
Al tocar un objeto, el dedo se envuelve suavementefusionándose con los contornos del objeto. La cámara y algoritmos especiales analizan el cambio en láminas de silicona y acrílico. Con base en el análisis, el robot determina la forma general del objeto, las irregularidades de la superficie, la orientación del objeto en el espacio y la fuerza con la que es necesario comprimir el objeto.
Los investigadores probaron sucaptura haciendo que solo uno de los dos dedos se toque. El dispositivo que crearon manipuló con éxito varios objetos, como un mini destornillador, una fresa de plástico, un tubo de pintura y una copa de vino. Al mismo tiempo, al capturar fresas, el sensor interno pudo detectar con éxito la granulosidad de su superficie, y al trabajar con un frasco, pudo leer el nombre grabado.
 Fuente: Laboratorio de Ciencias de la Computación e Inteligencia Artificial del MIT
Fuente: Laboratorio de Ciencias de la Computación e Inteligencia Artificial del MIT
Como señalan los autores de la obra, los objetos de vidriorepresentan un desafío para los sensores de visión artificial debido a la refracción de la luz. Los sensores táctiles le permiten eludir esta limitación. Cuando la empuñadura levantó el vaso, sintió la orientación del pie en el espacio y pudo asegurarse de que el vaso apuntaba hacia arriba antes de bajarlo a la mesa.
Los ingenieros notan que la creación de una cavidad en el interiorEl dedo perturbó ligeramente la estabilidad del agarre. Los científicos planean refinar el diseño de su dispositivo para corregir esta deficiencia. Además, planean desarrollar un agarre de tres dedos que pueda, por ejemplo, agarrar trozos de fruta y evaluar su madurez.
Lee mas:
MIT crea un motor térmico estacionario que supera a las turbinas
Después de diez años de trabajo, los científicos cuestionaron el modelo estándar de la física.
Mira cómo se ve el amanecer en Marte