¿Quiénes son los robots?
Hace unos años, apareció algo interesante en Reddit: los científicos describieron complejos
La robótica es una aplicación sinérgicacampo de actividad. Se compone de programación, mecatrónica y cibernética. La mecatrónica es algo que interactúa con el mundo real. Y la cibernética es una ciencia multienlace, que incluye, en primer lugar, la gestión de los programas creados.
¿Qué es un robot?Hace 15 años muchos hubieran dicho que se trata de un brazo robótico que trabaja en una fábrica y hace soldadura o pintura. Otra respuesta popular es el robot androide del mundo del cine. Pero, ¿un carro en movimiento o un vehículo no tripulado es un robot? Sí, esta es también una de las áreas de la robótica. Las aeronaves también son robots, algunos de los últimos desarrollos incluyen tecnologías inteligentes y son, de hecho, robots autónomos.
 El carro móvil también es un robot
El carro móvil también es un robot
También existe un área de robótica como campo.robótica - "robótica móvil". Esto incluye todos los robots que se mueven en un campo, edificio o bajo el agua. La aplicación más interesante, en mi opinión, es la agricultura.
historia de los aviones
La historia de los aviones comenzó en el pasado.siglo. Antes de eso, solo volaban globos sin motor, y era difícil llamarlos robots. A principios del siglo pasado, funcionaban dos tipos de aeronaves: aeronaves y aviones. El primer vuelo controlado fue realizado por los hermanos Wright. Además, el primer piloto automático apareció bastante rápido, casi 10 años después, ayudó a estabilizar el vuelo.
La dirección actual de la robótica está relacionada condesarrollo y disponibilidad de nuevos pilotos automáticos abiertos como PixHawk (PixHawk es hardware abierto para controladores, drones y otros UAV. Se utiliza con fines académicos, aficionados y profesionales). Un ejemplo de la llegada de los drones a la vida de cada persona es la entrega de pizzas por parte de la empresa Dodo Pizza junto con Copt Express, esto sucedió en 2014.
 historia de los aviones
historia de los aviones
Cómo se controla el dron
Los aviones modernos usan unode los tres principios de la creación de sustentación - aerostático, jet o aerodinámico. El principio aerodinámico del vuelo y la creación de sustentación (lanzar parte del aire hacia abajo) se puede implementar debido al movimiento de todo el aparato, equipado con una superficie de apoyo fija (ala), o debido al movimiento de piezas de apoyo individuales. del aparato (rotor principal, ventilador) en relación con el aire.
 Cómo vuelan los dispositivos
Cómo vuelan los dispositivos
El dron tiene una hélice que crea sustentación.Habiendo despegado del suelo, el dispositivo comienza a mover la hélice más rápido y se eleva. Pero la fuerza de acción es igual a la fuerza de reacción. Cuando la hélice gira, se crea un momento en la dirección opuesta: este es el diseño de helicópteros y helicópteros. Si el helicóptero tiene una hélice, no será estable. Por lo tanto, el dispositivo utiliza un esquema de dos rotores o un rotor de cola.
El cuadricóptero tiene un diseño muy simple:Por lo general, tiene cuatro tornillos, dos de los cuales giran en una dirección y dos en la otra dirección. Si el usuario necesita avanzar, algunas hélices giran más lentamente mientras que otras giran más rápido. Y si el usuario quiere girar, entonces algunos tornillos colocados en diagonal aceleran, mientras que otros reducen la velocidad.
 Cómo vuela un cuadricóptero
Cómo vuela un cuadricóptero
Los movimientos del helicóptero en las esquinas están relacionados con el movimiento a lo largocoordenadas. Si el piloto quiere avanzar, primero debemos inclinar el dron hacia adelante y luego, a medida que el dispositivo eléctrico avanza, estabilizarlo en el punto donde queremos permanecer.
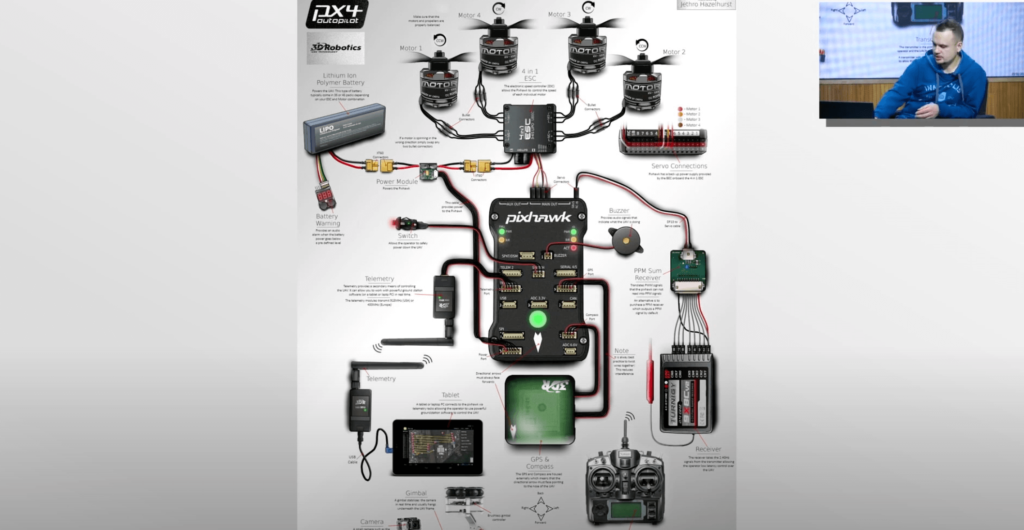
Este es un diagrama de uno de los pilotos automáticos más populares,sobre la base de los cuales se pueden hacer nuevos dispositivos. Se conecta a todos los motores y sensores. Además, los motores tienen su propia unidad de control, el regulador ESC - Electronic Speed Controller, que controla la velocidad del motor.
De los sensores, hay GPS para que el dron puedatrabajar al aire libre, volar a puntos y estabilizar la posición. Pero dentro del propio piloto automático también hay una IMU, un módulo de sensor inercial que le permite determinar los ángulos de actitud. También hay un canal de comunicación, una estación de control en tierra y una batería.
 dispositivo UAV
dispositivo UAV
Como se mencionó anteriormente, hay un nivelcontrol del motor: nosotros, sin dudarlo, podemos establecer la velocidad de rotación. El resto de los niveles funcionan con el mismo principio: el siguiente es el control de orientación.
Pero primero necesitamos controlar la velocidad de rotación.- Los helicópteros FPV vuelan a este nivel (dispositivos que le permiten ver la imagen de la cámara del dron en tiempo real en primera persona (FPV - Vista en primera persona). Los pilotos experimentados establecen la velocidad de rotación y conducen constantemente con el joystick. El siguiente La etapa es cuando el usuario puede estabilizar el ángulo, pero el dron aún se moverá. El siguiente es el control de velocidad, y el más alto es el control de posición, maniobras para moverse a un punto o moverse a lo largo de una trayectoria determinada.
Aquellos que quieren programar, construir ydrones de control: debe prestar atención al piloto automático de código abierto PIX4. Hay toda una comunidad alrededor de la robótica aérea (ROS - robotic operating system, o Open robotics), hay simuladores para drones. Por lo tanto, se pueden realizar muchos experimentos en el simulador sin tener el propio dron.
Etapas de desarrollo de drones
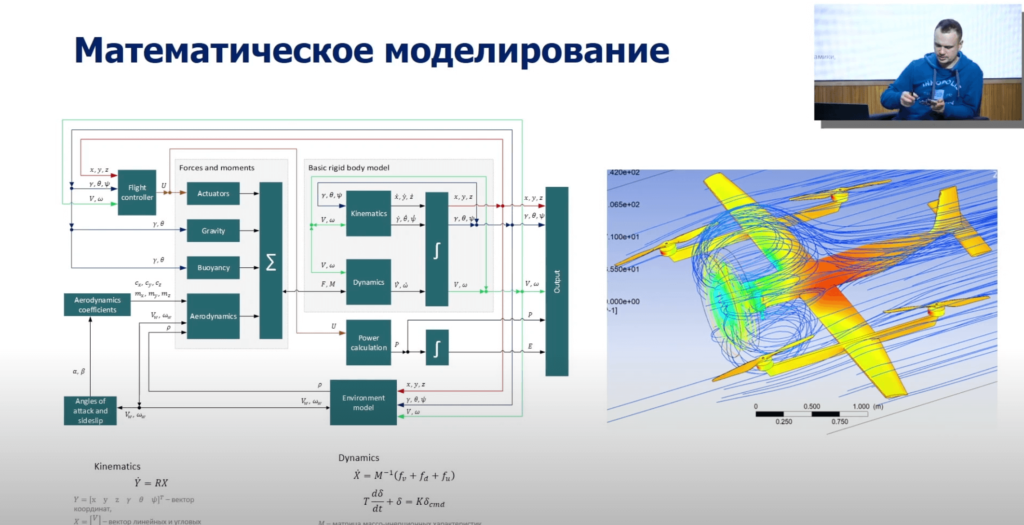
Los investigadores comienzan con un conceptomodelado, y luego necesitan construir un modelo preciso del aparato. Sin entrar en la fórmula, un modelo de helicóptero es esencialmente un modelo de cuerpo rígido. Esta es la segunda ley de Newton extendida a los sistemas de partículas. Tiene movimiento de traslación y rotación, hay cinemática y dinámica de movimiento, y para describir el modelo de un dispositivo específico, debemos agregar aquí la ecuación de fuerzas que actúan sobre un dron específico.
 Cómo se modelan los UAV
Cómo se modelan los UAV
El siguiente paso es desarrollar el sistema.administración. Si vamos por el camino clásico: primero averiguamos el modelo matemático exacto y, en base a él, ya sintetizamos el algoritmo de control o nuevas fórmulas. Todos los niveles se pueden incluir en el sistema de control: planificación de movimiento, percepción del entorno, estimación de estado con la ayuda de sensores. Los algoritmos nos permiten refinar nuestras coordenadas y datos.
 Sistema de control de drones
Sistema de control de drones
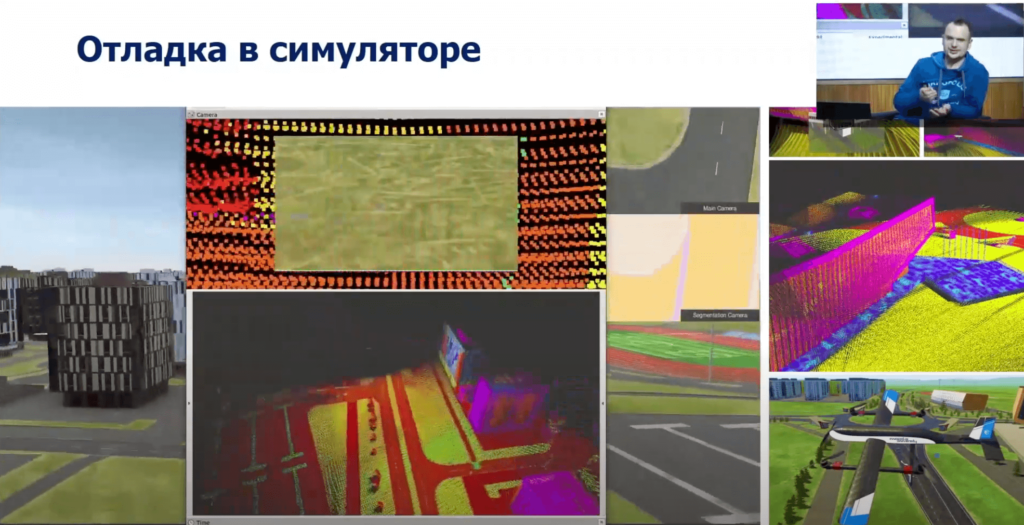
Cuando existe un algoritmo de control, éste puede ser inmediatamenteaplicar, pero hacerlo es bastante costoso. Los dispositivos fallan ante el menor error; esto debe tenerse en cuenta y realizar copias de seguridad. Para las pruebas se utilizan simuladores.
A continuación se muestra un recorrido virtual de Innopolises un producto de nuestra universidad, está disponible para descargar en GitHub. Este no es solo un componente visual, sino también los datos de todos los sensores del dispositivo. Tiene todos los sensores de posición, se controla como un dron y puede depurar todos los algoritmos de control.
 Cómo aprenden los drones en simulación
Cómo aprenden los drones en simulación
Cuando basado en la experiencia con el simulador aparecemás confianza: puede pasar a la implementación del hardware. Aquí se muestran sus componentes: la fabricación del dispositivo a partir de carbono y composite, la creación de la electrónica, la colocación de los motores, su fijación.
Las pruebas no empiezan en la calle:Primero, los dispositivos se prueban sobre una suspensión o un soporte especial. Se pueden utilizar para depurar elementos del funcionamiento de un vehículo aéreo no tripulado. Por ejemplo, aquí se muestra un avión de despegue y aterrizaje vertical: es un híbrido de helicóptero y avión; en el video se puede ver cómo hace frente a perturbaciones externas y mantiene un ángulo. A la derecha hay un experimento bastante loco en el que enciendes cinco motores a la vez y ves cómo lo maneja el sistema de control.
 Cómo se construyen los drones
Cómo se construyen los drones
Después de las pruebas, pasan a los vuelos.pequeños despegues a bajas velocidades, movimiento controlado con un piloto que puede tomar el control. El acorde final es un vuelo completamente no tripulado.
El dispositivo despega verticalmente.“como un helicóptero”, luego se enciende su motor principal, el dron acelera, cambia al modo avión y desarrolla suficiente velocidad para que el ala funcione. Luego se apagan las hélices de contorno y vuela como un avión: el proceso de aterrizaje se realiza en orden inverso.
¿Qué está pasando con los drones?
Una de las tareas que los modernoscientíficos, sorteando obstáculos en vuelo. Algunos drones ya saben cómo hacer esto, pero la tarea es un poco más amplia: debe enseñar a los dispositivos a moverse lo más rápido posible en un entorno con obstáculos. Y todavía hay espacio para esforzarse y mejorar los algoritmos.
Otro ejemplo de tales pruebas es un vuelo abosque. Hay un enfoque muy interesante: aquí no solo se utilizan nuevos algoritmos, sino también sensores: una cámara de eventos. Esta es una cámara de muy alta frecuencia que transmite la diferencia entre fotogramas en cada unidad de tiempo: esto le permite controlar y reaccionar rápidamente ante los obstáculos.
En el campo de la planificación de movimiento de drones,competencia: quién lo hará más rápido. La tarea es mapear un área desconocida, construir su representación tridimensional, encontrar objetos en ella. Volamos en la universidad, pero también resolvimos el problema de encontrar objetos. Nuestros resultados fueron incluso mejores que los algoritmos publicados conocidos.
Hay competiciones en la carrera de drones.Se realizan en dispositivos con cámara, cuando el piloto tiene gafas y controla el dron para volar a través de la puerta lo más rápido posible. Todo un evento espectacular, donde la misma tarea debe realizarse en modo automático. Desafortunadamente, hasta ahora la computadora ha logrado derrotar a una persona solo en el ajedrez, y el robot dron no ha podido superar a un piloto humano, aunque el progreso ya es bastante serio. Un dron con la ayuda de un algoritmo de visión artificial puede realizar tales tareas, el trabajo es solo para aumentar la velocidad.
Otra competencia es Microsoft Games ofdrones, se lleva a cabo en un simulador. En la misma zona se lleva a cabo una de las competiciones más famosas de Arabia Saudí. Los participantes allí son reclutados con tres años de anticipación.
Dispositivos no tripulados se utilizan para espectáculos de drones- Se trata de eventos espectaculares que hoy han sustituido a los fuegos artificiales. Pero ese no es el único uso grupal: pueden inspeccionar un área más grande.
donde aplicar
Para que no parezca exclusivamente científicodesarrollo, a continuación se muestra una demostración del dron Skydio. Ahora bien, este es el dispositivo más avanzado en términos de autonomía. Este es un ejemplo de cómo las tecnologías modernas: cartografía, evitación de obstáculos, planificación del tráfico se utilizan juntas en un producto que ya está disponible para el usuario.
Otra dirección son los nuevos diseños.aeronave. Uno de ellos son los drones plegables. Uno de estos dispositivos puede volar a espacios reducidos para su inspección después de un accidente. Otro ejemplo es un dron que puede desplegarse. Por ejemplo, puede salir volando de un tubo neumático estrecho y luego volar como de costumbre.
También tenemos un proyecto en esta área - esto esTensodrone suave. Este es el primer dron de caparazón blando que vuela. El placer es que puedes soltarlo y permanecerá intacto. Además, puede cambiar la longitud de las vigas, la tensión de los cables.
Dos ejemplos que cobrarán vida enpronto. Primero, la entrega mediante drones. Ahora hay una implementación muy interesante en la que combinamos una terminal de paquetes y una estación de aterrizaje de drones; en este caso, no tenemos que preocuparnos de cuándo llegará el drone, dónde aterrizará, para que podamos llegar a él en tiempo y recoger la carga antes de que sea robada. El segundo ejemplo es un taxi volador. Esta es el área de desarrollo más interesante y ya existen prototipos en funcionamiento. Pero esto sólo sucederá en la próxima década.
Qué desarrollos en el campo de los taxis voladores han aparecido en los últimos 6 años:
- La empresa "Hover" presentó un dispositivo conmotor eléctrico silencioso y dimensiones compactas, como un automóvil. Despega a una altura de 150 m y aterriza en una plaza de aparcamiento estándar. El dron está diseñado para dos pasajeros, la carga útil máxima es de 300 kg y la velocidad es de 200 km/h.
— En 2016, la empresa rusa Hoversurfmostró una hoverbike que puedes llevar contigo y despegar en cualquier momento desde un espacio de estacionamiento regular de la ciudad. Alcanza velocidades de hasta 100 km/h, y la altura de elevación está limitada a la fuerza a 5 metros por razones de seguridad.
— En 2018, desarrollado por pasajeros de AirbusEl avión Alpha One VTOL subió a una altura de 5 metros y permaneció en el aire durante 53 segundos. El usuario podrá llamar al UAV a través de la aplicación y llegar de un punto a otro tanto dentro como fuera de la ciudad.
— En 2020, el taxi aéreo CityAirbus hizoprimer vuelo libre. Las pruebas se llevaron a cabo en los suburbios de París, la ciudad de Ile-de-France.El avión CityAirbus es capaz de moverse a velocidades de hasta 120 km/h en una distancia de hasta 30 km. El peso del taxi volador es de más de 2,2 toneladas, CityAirbus está equipado con tres asientos para pasajeros y un asiento para el conductor.
- En 2022, la startup china Pantuo Aviation presentó el T1, un taxi volador de demostración con conducto de aire. Volará a velocidades de más de 300 km/h y tendrá un alcance de 250 km.
Lee mas:
La sonda espacial voló a 200 km de Mercurio. Mira lo que vio
Científicos descubren cómo las vitaminas afectan la incidencia de cáncer
El casco chino que lee la mente hace sonar la alarma cuando una persona ve contenido pornográfico