Cambridgen yliopiston insinöörit ovat kehittäneet pehmeän robottikäsin, johon on painettu
Tutkijat käyttivät painettuaAntropomorfinen käsi, johon on istutettu tuntoantureita 3D-tulostimeen, jotta käsi voi "tuntea" mitä se koskettaa. Käsi pystyi vain passiiviseen liikkeeseen ranteen perusteella. "Tämän rakenteen suuri etu on liikerata, jonka voimme saada ilman toimilaitteita", kirjoittajat sanovat.
"Passiivisen" robottikäden harjoittelu. Video: Cambridgen yliopisto
Tutkijat suorittivat yli 1 200 testiä robottikäsivarrella,katsellen hänen kykyään tarttua pieniin esineisiin pudottamatta niitä. Aluksi robottia koulutettiin käyttämällä pieniä 3D-tulostettuja muovipalloja ja tarttui niihin ennalta määrätyillä ihmisten mielenosoituksista johdettujen toimien avulla.
Robotti käytti yritystä ja erehdystäselvittää, mikä sieppaus onnistuu. Palloharjoittelunsa päätyttyä hän yritti tarttua erilaisiin esineisiin, kuten persikkaan, tietokoneen hiiriin ja kuplamuovin rullaan. Näissä testeissä käsi pystyi tarttumaan onnistuneesti 11 esineeseen 14:stä.
Erikokoisten, -muotoisten ja -rakenteisten esineiden vangitseminen- tehtävä, joka on yksinkertainen ihmiselle, mutta vaikea robotille. Suurin osa nykypäivän edistyneistä roboteista ei pysty suorittamaan manipuloivia tehtäviä, joita pienet lapset voivat helposti käsitellä. Esimerkiksi ihmiset tietävät vaistomaisesti, kuinka paljon voimaa on käytettävä munan nostamiseen, mutta robotille tämä on ongelma: jos ei ole tarpeeksi vahva, esine putoaa, liian voimakas rikkoo munan.
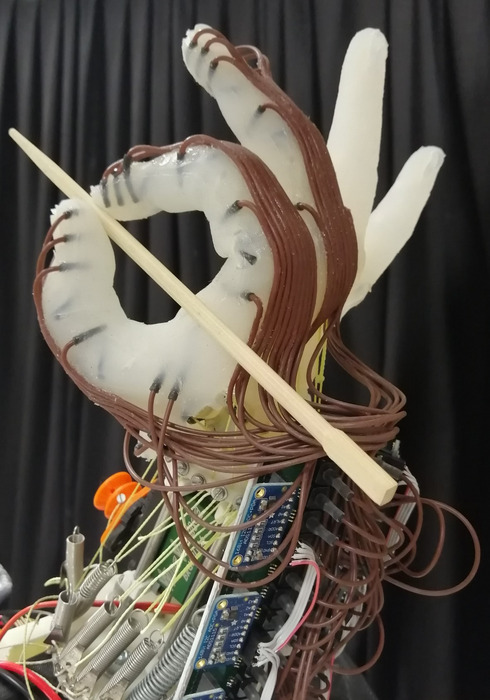 Prototyyppi robottitarttuja. Kuva: Cambridgen yliopisto
Prototyyppi robottitarttuja. Kuva: Cambridgen yliopisto
Hienostunut tekniikka moottoroiduilla sormillavaatii huomattavan määrän energiaa ja suuren määrän monimutkaisia ja kalliita toimilaitteita jokaiseen liitokseen. Insinöörien ehdottama passiivinen ote tekee robotista paljon helpommin hallittavan ja paljon energiatehokkaamman. Tutkijat uskovat, että niiden mukautuvaa suunnittelua voitaisiin käyttää edullisen robotiikan kehittämiseen, joka kykenee luonnollisempaan liikkeeseen.
Lue lisää:
Katso Marsin korkeimman resoluution kartta: 110 000 kuvaa ja 5,7 biljoonaa pikseliä
Kvarkkien "meri" yhden protonin sisällä: mistä alkuainehiukkanen koostuu
Uusi kuva Hubblesta hämmensi tutkijoita
Kannessa: prototyyppi robottitarttuja. Kuva: Cambridgen yliopisto