Kalaparvet osoittavat monimutkaista, synkronoitua käyttäytymistä, joka auttaa niitä löytämään ruokaa, vaeltaa ja
Tämän tyyppinen hajautettu, itsenäinenitseorganisaatio ja koordinaatio ovat houkutelleet tutkijoita pitkään: he päättivät käyttää sitä robotiikassa. Harvard School of Engineering and Applied Sciences -tutkijaryhmä. John A. Paulson (SEAS) ja Wyss Institute for Biological Engineering ovat kehittäneet kalavaikutteisia robotteja, jotka voivat synkronoida niiden liikkeet.
Robotit toimivat usein paikoissa, joissaluoksepääsemättömille tai ihmisille vaarallisille alueille ja alueille, joihin ihmisen puuttuminen ei ehkä ole edes mahdollista. Tällaisissa tilanteissa sinulla on todella oltava erittäin itsenäinen robottiparvi. Hyödyntämällä kalojen käyttäytymistaitoja ja 3D-visuaalista havaintoa pystyimme luomaan järjestelmän, jolla on suuri autonomia ja joustavuus veden alla.
Florian Berlinger, Ph.D. ehdokas SEASissa ja Wyssissä ja paperin ensimmäinen kirjoittaja
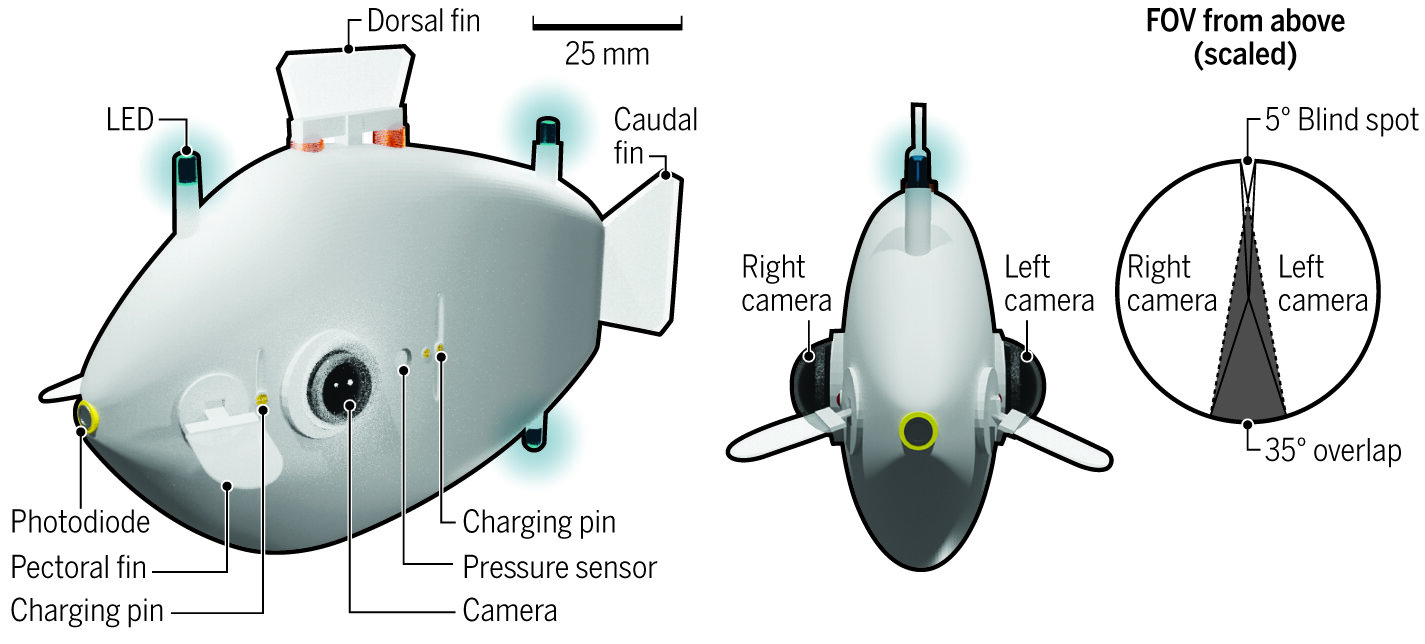
Kaloista inspiroitunut robottiparvi on vastaanottanutnimi Blueswarm. Tutkijat ovat kehittäneet visioon perustuvan koordinointijärjestelmän, joka perustuu sinisiin LEDeihin. Jokainen vedenalainen robotti on varustettu kahdella kameralla ja kolmella LED-valolla. Laivan kamerat havaitsevat lähellä olevien kalojen LED-valot ja määrittävät niiden etäisyyden, suunnan ja kurssin erikoisalgoritmilla.
Joten Blueswarmilla voi olla monimutkainen itseorganisoitunut käyttäytyminen: erityisesti aggregaatio, sironta ja ympyrän muodostuminen.
Lue lisää
Abortti ja tiede: mitä tapahtuu synnyttäville lapsille
Tutkimus: Ihmiset eivät kykene hallitsemaan superälyä tekoälykoneita
Katso kauneimmat kuvat Hubbleista. Mitä kaukoputki on nähnyt 30 vuoden aikana?