Uuden työn kirjoittajat olettivat, että malleja koulutetaan parhaiten ennustamalla
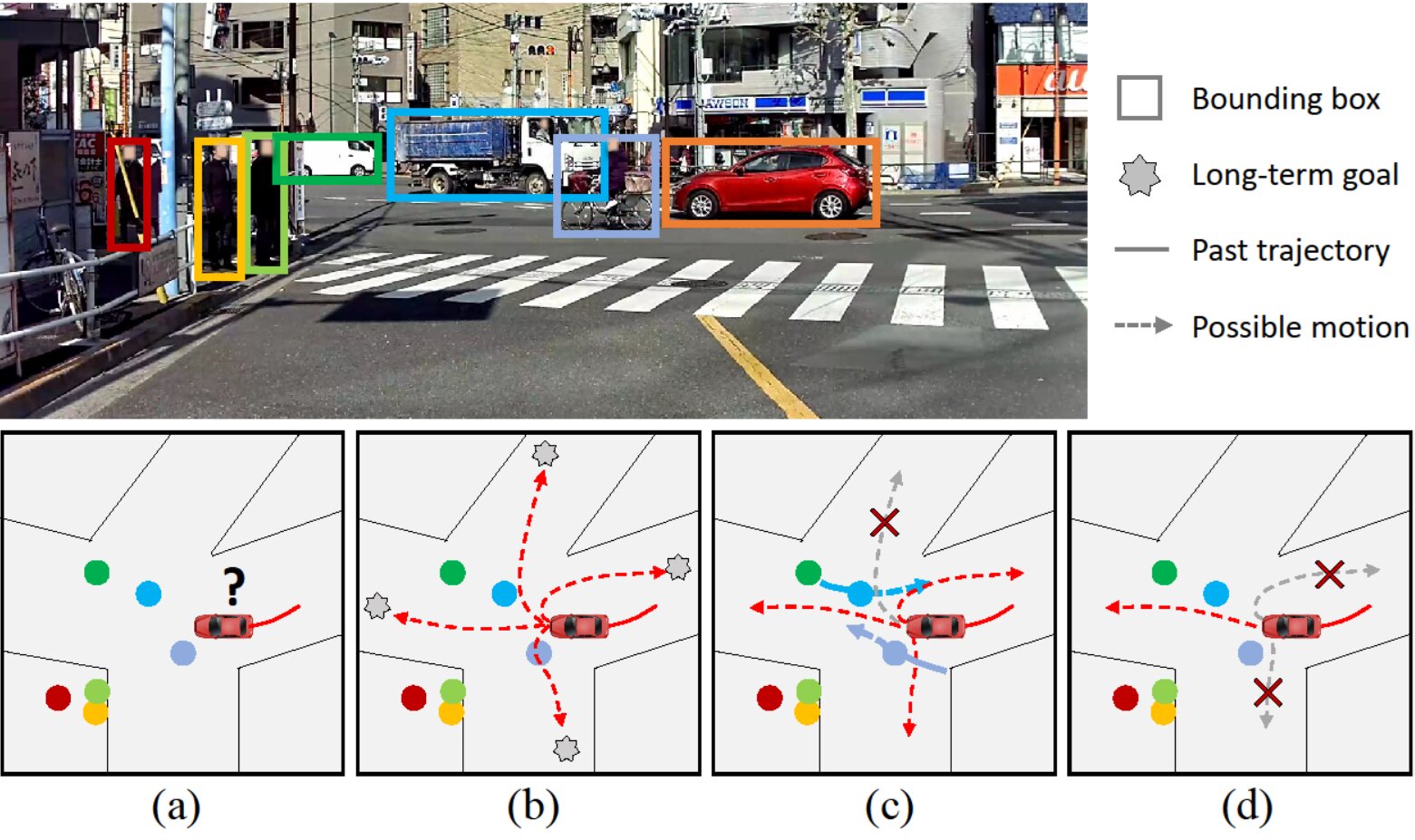
Tutkijat suunnittelevat kehittävänsä arkkitehtuurin, joka ottaa huomioon sekä lyhyen että pitkän aikavälin tavoitteet – nämä ovat pääkomponentit arvioitaessa jalankulkijan tai auton aikomuksia.
Esimerkiksi on auto, joka on risteyksessähaluaa kääntyä vasemmalle. On tärkeää ottaa huomioon paitsi liikenteen dynamiikka myös se, miten tarkoitus voi muuttua eri tekijöistä riippuen: oman halun, muiden tienkäyttäjien tai esteiden vuoksi.
Seuraavaksi algoritmi koodaa ensin aiemmat kokemukset, joiden perusteella malli on koulutettu ennustamaan pitkän ja lyhyen aikavälin seuraukset.
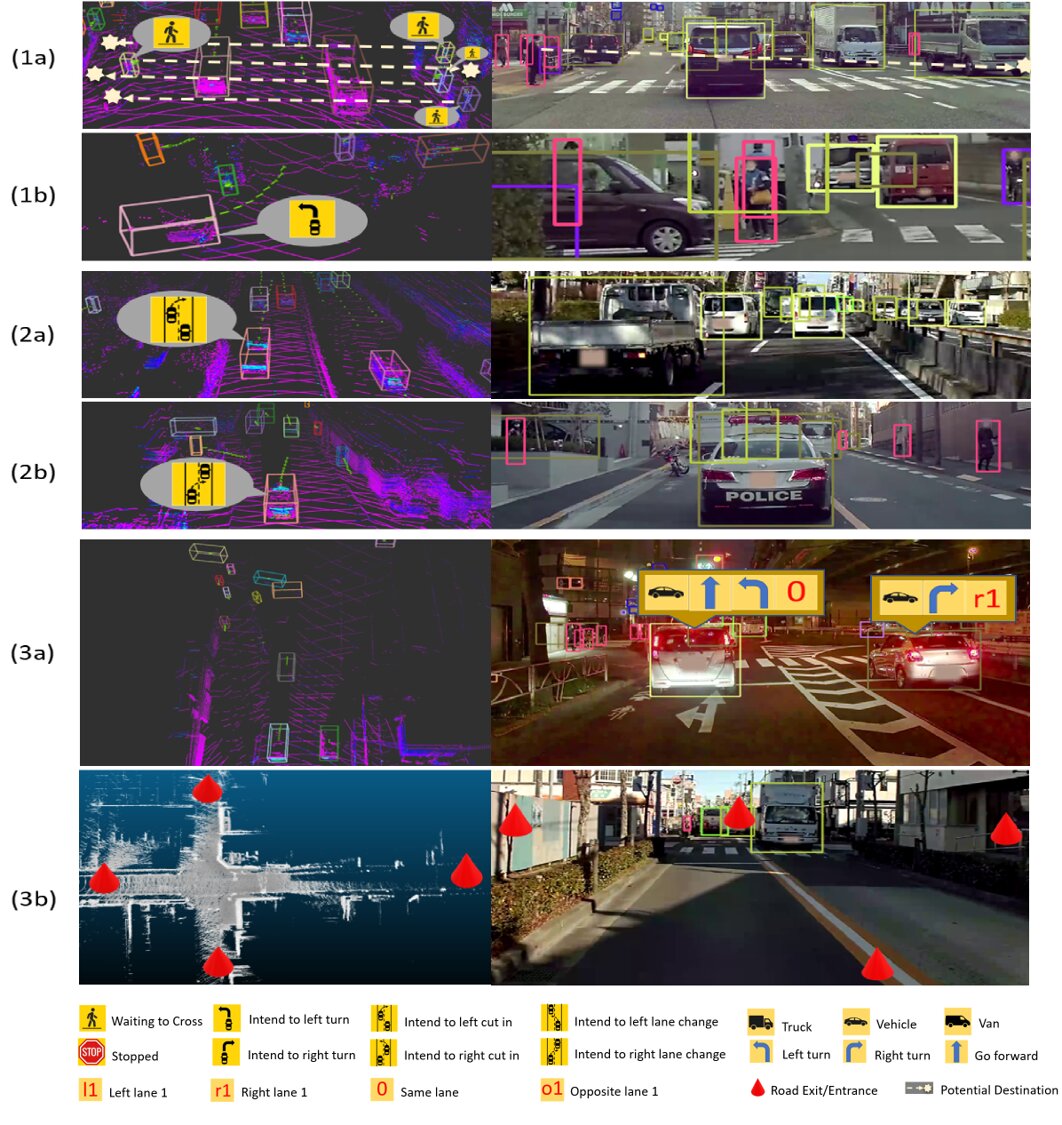
Malli määrittää kaikki ympäröivät kohteetvihjeet ovat "aikeita", jotka voivat muuttua matkan varrella, "ympäristö", kuten liikennemerkit ja puut, jotka vaikuttavat tekijöiden aikomuksiin, ja "kontekstuaaliset vihjeet", kuten sää- ja tieolosuhteet.
Tutkijat arvioivat malliaan useissa testeissä ja havaitsivat, että se suoriutui 27 prosentilla muita huippuluokan liikeradan ennustusmenetelmiä.
Kehittäjät uskovat, että malli voi ollakäytetään parantamaan itsenäisten ajoneuvojen turvallisuutta ja suorituskykyä. Lisäksi muut tutkimusryhmät voivat LOKI -aineiston avulla valmistaa omia mallejaan jalankulkijoiden ja ajoneuvojen polkujen ennustamiseksi tiellä.
Lukea Edelleen:
Новая iOS 15: дата выпуска, дизайн и функции iPhone. Рассказываем все, что известно
Erittäin ohut materiaali valmistettiin valkoisesta grafeenista. Se korvaa palvelimet
Katso raskas hyökkäys drone, joka kuljettaa tonnia aseita