Facebook käyttää tietokonenäön ja luonnollisen kielen käsittelyjärjestelmiä, jotka ovat jo käytössä
Robotin on tarkoitus olla täysin itsenäinen.ja itseoppimisen järjestelmien on opittava suoraan raaka-aineista. Näin laite pystyy nopeammin sopeutumaan uusiin haasteisiin ja muutosolosuhteisiin, yritys uskoo. Keinotekoisen älykkyyden perusta on RL-mallin mukainen oppiminen, jonka avulla robotit voivat oppia itsenäisesti kokeilun ja virheen avulla.
Haluaisimme opettaa robotille kävelemään ilman apua. Liikkuminen on robotiikassa erittäin vaikea tehtävä, ja tästä syystä meidän mielestämme on erittäin jännittävää.
Facebook Research Developer Roberto Calandra
Robotin erottuva piirre Facebookissaon, että laitetta ei toteuteta algoritmeille sen liikettä varten. Aluksi hän ei voi kävelemään, mutta vähitellen käyttämällä oppimisalgoritmia, hän alkaa vuorovaikutuksessa hänen ohjaimiensa kanssa, jotka voidaan jo aktivoida liikettä varten. Mitä enemmän kokemusta robotti saa, sitä paremmin se toimii.

Tässä tapauksessa robotti ei saa vainmääritä sijaintisi ja suuntaasi avaruudessa, mutta pidä myös tasapaino ja kytke antureiden impulssit keskenään, jotta monimutkaiset mekanismit, kuten polvi, toimivat oikein.
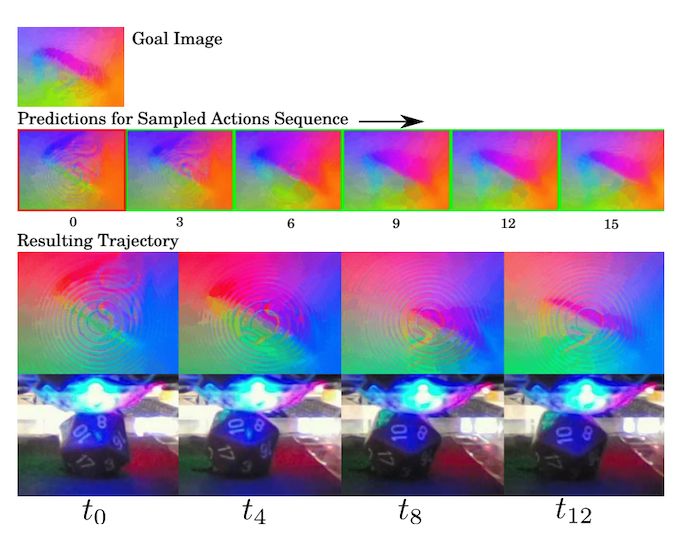
Robotit Facebookista tietokonenäköönkäyttää jotakin videoiden suosion ennustamiseen kehitetyistä algoritmeista. Hermoverkko voi analysoida useita sekunteja videota ja ennustaa lisää kuvia jopa ilman katselua, mikä nopeuttaa valtavan materiaalimäärän analysointia.
Osana Facebook-tutkimustaesitteli ensimmäisen laitteen - manipulaattorin, joka voi työskennellä joystickillä, rullaa kuutio 20 puolella ja ymmärtää oikein toisessa tai toisessa pudotetut tulokset.
Visuaalisten ja tuntoon perustuvien tietolähteiden yhdistäminen voi parantaa tulevien itsenäisten oppimisympäristöjen oppimismenetelmiä ja toimivuutta Facebookin mukaan.
Kehittäjien mukaan nyt samanlainenprojektit käyttävät vain yhden tyyppistä (korkeintaan kahta) tietoa, kun taas robottilaitteiden on kohdattava tietoa eri aisteista voidakseen toimia täysin.