Google on tehnyt tutkimusta ja asettanut algoritmeja, jotka nopeuttavat ja yksinkertaistavat prosessia
Mitä teki
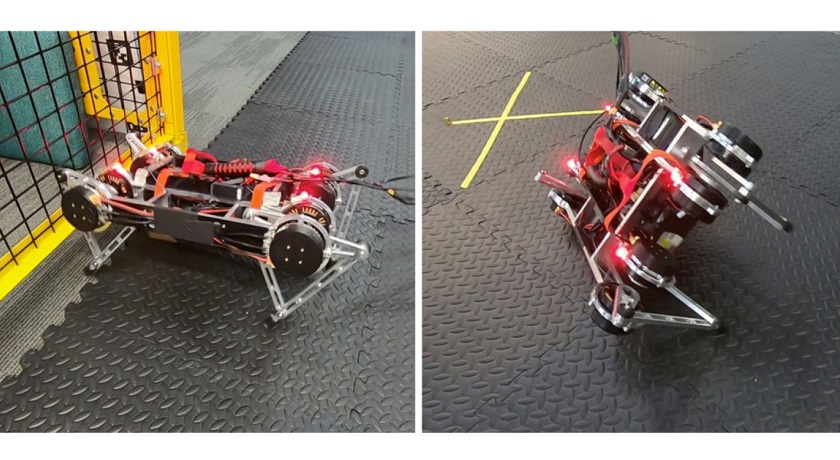
Google Roboticsin tutkijat ovat luoneetnelijalkainen robotti, joka muutamassa tunnissa oppi kävelemään edestakaisin ja kääntymään itsestään. Aiemmin algoritmeja testattiin virtuaalirobotilla virtuaaliympäristössä, mikä auttoi estämään todellisen robotin vahingoittumisen. Mutta eri pintojen jäljittelyprosessi oli liian työvoimavaltainen.
</ img>
Tutkijat ovat aloittaneet todellisen koulutuksen jarobotti sopeutui nopeasti epätasaiseen maastoon. Ihmisen väliintulo oli kuitenkin edelleen tarpeen, ja tutkijoiden oli puututtava ihmisen oppimiseen. Joten he rajoittivat pinta-alaa ja pakottivat robotin oppimaan useita liikkeitä kerralla. Jos robotti, saavutettuaan alueensa reunan, kävelee eteenpäin, se huomaa, että edessä on este ja alkaa kävellä taaksepäin hankkien uuden taidon.
Tämän järjestelmän avulla robotti pystyi yrityksen ja erehdyksen avulla lopulta oppimaan liikkumaan itsenäisesti eri pinnoilla.
Tutkimuksella on kuitenkin rajoituksia:Tekniikka ei ole vielä yleismaailmallinen ja sopii kaikentyyppisille roboteille. Mutta tutkijat toivovat voivansa mukauttaa uudet algoritmit erilaisiin robotteihin. Jos he onnistuvat, se voi edistää robotiikkaa huomattavasti.