Robotistien ehdottaman oppimismenetelmän avulla robotti oppii itsenäisesti suorittamaan uintiliikkeet.
"Tutkimuksessamme esitimmebiologisen vahvistuksen oppimisen ohjausmenetelmä vedenalaisten robottien liikkeen simuloimiseksi", sanoi Gang Chen, yksi kehitystyön tekijöistä. "Tämä menetelmä perustuu yhteen aikaisemmista majavien liikettä koskevista töistämme, joka julkaistiin Springer Linkin Journal of Intelligent & Robottijärjestelmät".
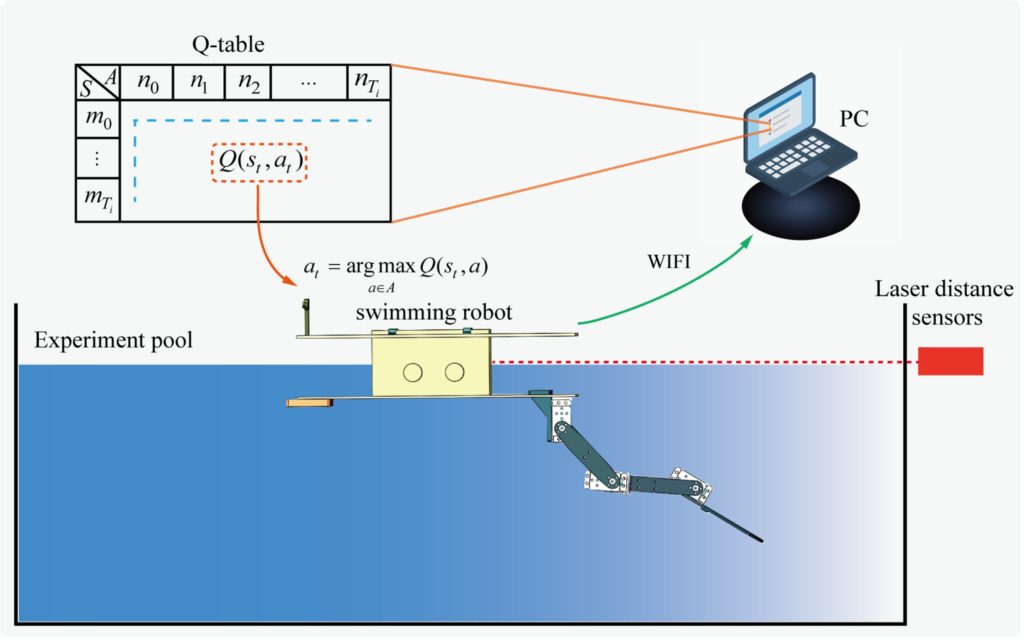 Majavarobotin koulutuksen periaate
Majavarobotin koulutuksen periaate
Vedenalaisia robotteja, kuten Chenin ja hänen luomiaan robottejakollegat ovat epälineaarisia järjestelmiä, ja niiden liikkeisiin liittyy monimutkaista hydrodynamiikkaa. Siten niiden liikkeen tarkka mallintaminen voi olla erittäin monimutkainen tehtävä, joka vaatii merkittäviä laskennallisia resursseja.
Toisin kuin muut sukellusveneen ohjausmallitChenin ja kollegoiden kehittämä robottilähestymistapa ei vaadi monimutkaisten nestedynamiikkaan perustuvien liikemallien integrointia. Tämä johtuu siitä, että se perustuu majavien uimisesta vastaavien nivelten toiminnan yksinkertaistamiseen. Tämä helpottaa mallin kouluttamista ja vähentää myös robotin tehottomia liikkeitä harjoittelun aikana.
”Yhdistämällä vahvistusoppimistamajavien uintikäyttäytymisen taustalla olevia mekanismeja, menetelmämme toteuttaa robottiohjauksen uinnissa mahdollisimman nopeasti ja tehokkaasti”, Chen selitti. "Huomioisin etu on, että sillä vältetään monimutkaisten liikkeenohjausmallien luominen ja se toteuttaa nopeasti majavan kaltaisen yksijalkaisen robotin uintiohjauksen."
Lue lisää
Amerikkalainen satelliitti "näki" epätavallisen viestin Maasta
Julkaistu video raketista, joka laukaistiin kokeellisesta kiihdyttimestä
Hirviö galaksimme keskustassa: katso kuvaa Linnunradan mustasta aukosta