Korea Advanced Institute of Science and Technology -instituutin insinöörit suunnittelivat ja loivat nelijalkaisen
Sarjan Spider-Manin inspiroima robottiMARVEL sarjakuvat, käyttävät sähkömagneetteja ja magneettisia elastomeerejä liikkumiseen. Nämä ovat hybridimateriaaleja, jotka koostuvat kumimaisesta aineesta, johon on sekoitettu magneettisia hiukkasia. Kytkemällä magnetismin päälle ja pois, robotti voi tarttua seinän pystypisteeseen yhdellä jalalla ja pitää kiinni, kun muut jalat liikkuvat, ja ottaa sitten seuraavan askeleen.
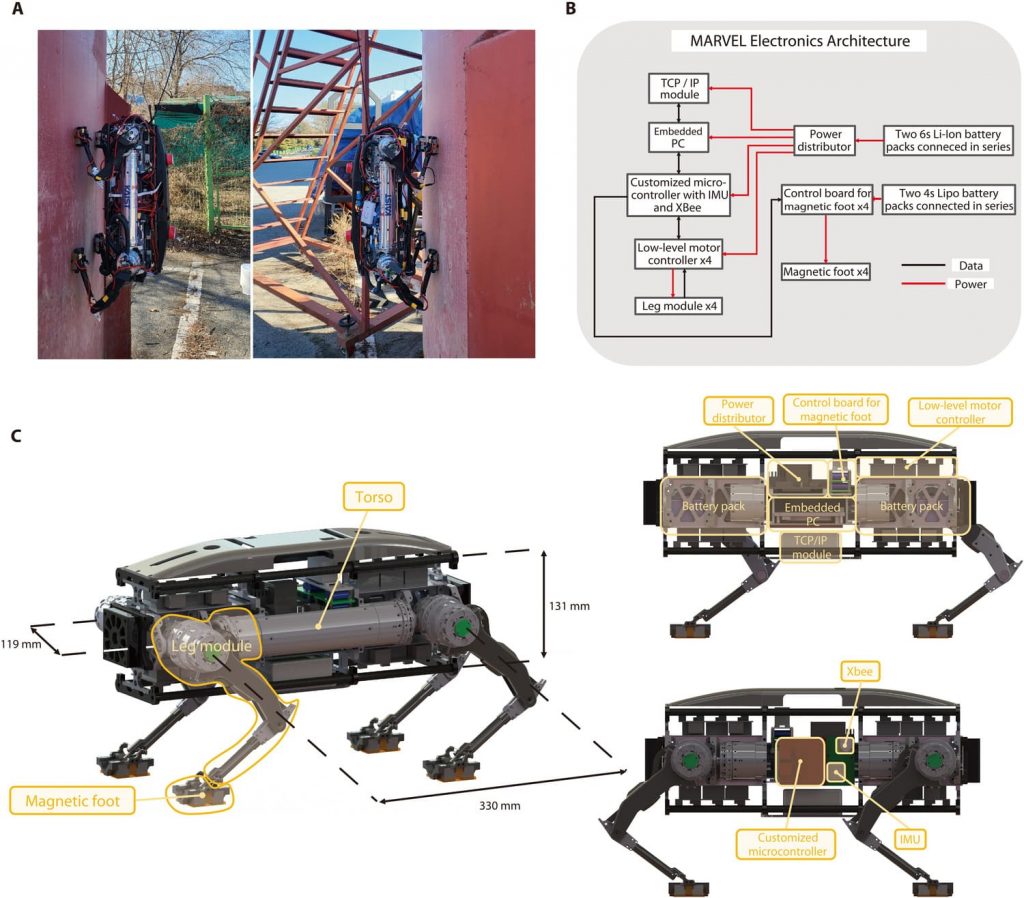 Nelijalkainen robotti MARVEL. Kuva: Seungwoo Hong et al., Science Robotics
Nelijalkainen robotti MARVEL. Kuva: Seungwoo Hong et al., Science Robotics
Jotta robotti voi liikkua seiniä pitkin japystysuorille pinnoille, insinöörit ohjelmoivat robotin opettamalla sen välttämään esteitä. Tätä varten hän käyttää tekniikkaa, joka muistuttaa kissojen käyttäytymistä. Robotti "testaa" pintaa ennen siirtymistä eteenpäin ja ottaa pieniä ensiaskeleita etutassuillaan ennen takajalkojen liikuttamista.
Nelijalkainen MARVEL-robotti kiipeää tankin päälle. Video: Seungwoo Hong et al., Science Robotics
Testaus tutkimuslaboratoriossaosoitti, että robotti pystyy kiipeämään metalliseiniin ja kävelemään katossa. Lisäksi hän läpäisi kokeen onnistuneesti ja kykeni kiipeämään vanhaan avoimeen säiliöön, jossa oli ruosteiset oranssit seinät öljyisten aineiden varastointia varten.
Robotti ei vain kiivennyt rakenteeseen, vaan myösvoitti onnistuneesti paikat, joissa ei ollut tarpeeksi metallia, ja ohitti esteet. Tutkimus osoitti, että se pystyy kantamaan jopa 3 kg:n hyötykuorman. Se liikkuu vaihtelevalla nopeudella maastosta riippuen ja kiihtyy oikeissa paikoissa jopa 0,7 m/s.
Nelijalkainen robotti MARVEL nostaa kuorman. Video: Seungwoo Hong et al., Science Robotics
Lue lisää:
Vetyenergia, materiaali kylmää säätä vastaan ja biolisäaineet COVID-19:ää vastaan: mitä tiedemiehet luovat pohjoisessa
Tutkijat ovat selvittäneet, kuka hyötyi dinosaurusten kuolemasta
Katso kuvaa maasta avaruudesta: sen teki ensimmäinen yksityinen moduuli