Uudessa mallissa yhdistyvät robotiikka, nestedynamiikka ja biomekaniikka, joten uusi kalamainen robotti
Uppoajoneuvot on tyypillisesti suunniteltu yhdelle matkanopeudelle, eivätkä ne usein voi kulkea nopeammin tai hitaammin. Mutta uutta robottia voidaan käyttää jopa moninopeuksisissa tehtävissä.
Dan Quinn, apulaisprofessori, tekniikan ja sovellettavien tieteiden korkeakouluVirginian yliopiston tiedemiehet ja hänen kollegansa keksivät, kuinka suunnitella vedenalaisia ajoneuvoja vaihtelevalla nopeudella. Ajatuksena oli tehdä kalanhäntä säädettävällä jäykkyydellä: sen tasosta riippuen voit saavuttaa erilaisia nopeuksia.
Ongelmana on, että ei ole tunnettua tapaamittaa uivan kalan hännän jäykkyyttä, joten on vaikea ymmärtää, millä periaatteilla tämä indikaattori muuttuu luonnollisessa ympäristössä. Quinn ja Zhong ratkaisivat tämän ongelman yhdistämällä nestedynamiikan ja biomekaniikan tuottamaan mallin siitä, kuinka ja miksi hännän jäykkyyttä tulisi säätää. Tuloksena he johtivat kaavan: jäykkyys kasvaa uintinopeuden kasvaessa neliössä.
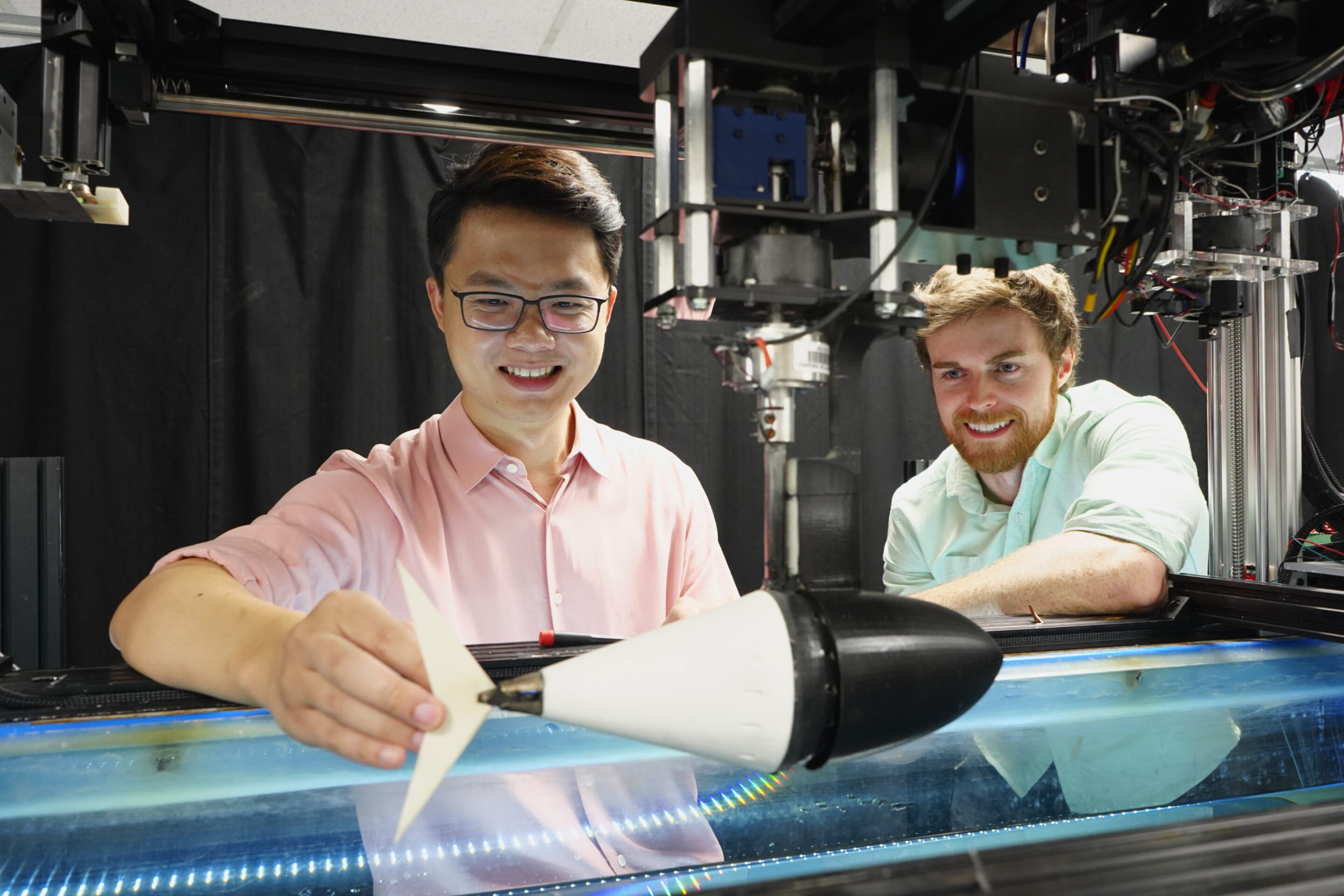
Teorian testaamiseksi he rakensivat kalamaisen robotin, jossa oli ohjelmoitava keinotekoinen jänne säätämään hännän jäykkyyttä uinnin aikana.
Tämän seurauksena robotti pystyi uida laajemmalla nopeusalueella ja tuhlata vähemmän energiaa kuin robotit, joilla oli kiinteä jäykkyys.
Lue lisää:
Katso nopein hypersonic -lentokone
Maapallon pyörimisen hidastuminen aiheutti hapen vapautumista planeetalle
Mitä tapahtuu kryptovaluutalle: noususta ja laskusta valtion tunnustamiseen