Professeur Edward Anderson du Massachusetts Institute of Technology et son étudiante diplômée Sandra Liu
La poignée se compose de deux doigts nervurés flexibles,qui s'adaptent à la forme de l'objet avec lequel ils sont en contact. Ces doigts, comme dans de nombreux développements similaires, sont fabriqués à partir de matériaux plastiques souples sur une imprimante 3D. Cependant, dans leur robot, les ingénieurs ont supprimé les nervures transversales situées à l'intérieur des doigts et leur donnant de la rigidité. Au lieu de cela, les chercheurs ont installé une caméra et des capteurs.
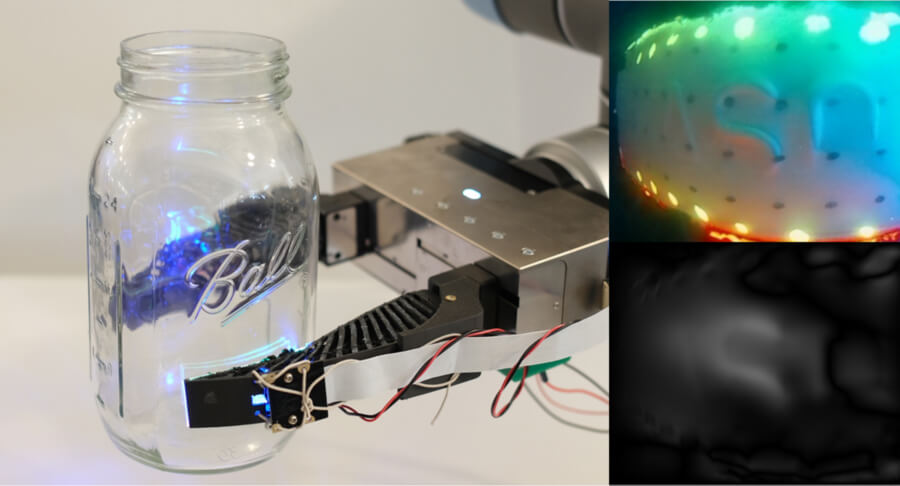
Un minceune feuille acrylique sur laquelle sont fixés des coussinets de gel de silicone « sensibles ». Une caméra est placée profondément dans la cavité, dirigée vers la couche acrylique, et toute la cavité est éclairée par des LED.
Lorsque vous touchez un objet, le doigt s'enroule doucement autourcelui-ci, se confondant avec les contours de l'objet. La caméra et des algorithmes spéciaux analysent l'évolution des feuilles de silicone et d'acrylique. Sur la base de l'analyse, le robot détermine la forme générale de l'objet, les irrégularités de surface, l'orientation de l'objet dans l'espace et la force avec laquelle il est nécessaire de comprimer l'objet.
Les chercheurs ont testé leurcapturer en faisant toucher un seul des deux doigts. L'appareil qu'ils ont créé a manipulé avec succès divers objets, tels qu'un mini tournevis, une fraise en plastique, un tube de peinture et un verre de vin. Dans le même temps, lors de la capture de fraises, le capteur interne a pu détecter avec succès le grain de sa surface et, lorsqu'il travaillait avec un bocal, il pouvait lire le nom gravé.
 Source : Laboratoire d'informatique et d'intelligence artificielle du MIT
Source : Laboratoire d'informatique et d'intelligence artificielle du MIT
Comme le notent les auteurs de l'ouvrage, les objets en verrereprésentent un défi pour les capteurs de vision par ordinateur en raison de la réfraction de la lumière. Les capteurs tactiles vous permettent de contourner cette limitation. Lorsque la poignée soulevait le verre, il sentait l'orientation de la tige dans l'espace et pouvait s'assurer que le verre était orienté vers le haut avant de le poser sur la table.
Les ingénieurs notent que la création d'une cavité à l'intérieurdoigt a légèrement perturbé la stabilité de la prise. Les scientifiques prévoient d'affiner la conception de leur appareil pour corriger cette lacune. De plus, ils envisagent de développer une pince à trois doigts qui puisse, par exemple, saisir des morceaux de fruits et évaluer leur maturité.
Lire la suite:
Le MIT crée un moteur thermique stationnaire qui surpasse les turbines
Après dix ans de travail, les scientifiques ont remis en question le modèle standard de la physique
Découvrez à quoi ressemble le lever du soleil sur Mars