Les ingénieurs développent un bras robotique qui collectera les échantillons collectés par le rover depuis Mars.
L'architecture du manipulateur imite l'humainbras avec épaule, coude et poignet. De plus, le robot a son propre "cerveau" et "yeux" intégrés. L'ESA rapporte que le bras peut effectuer une large gamme de mouvements avec sept degrés de liberté. Un haut niveau de dextérité permettra à la main de retirer les tubes du rover, de les soulever du sol martien, de les insérer dans le conteneur et de fermer le couvercle avant le lancement depuis Mars.
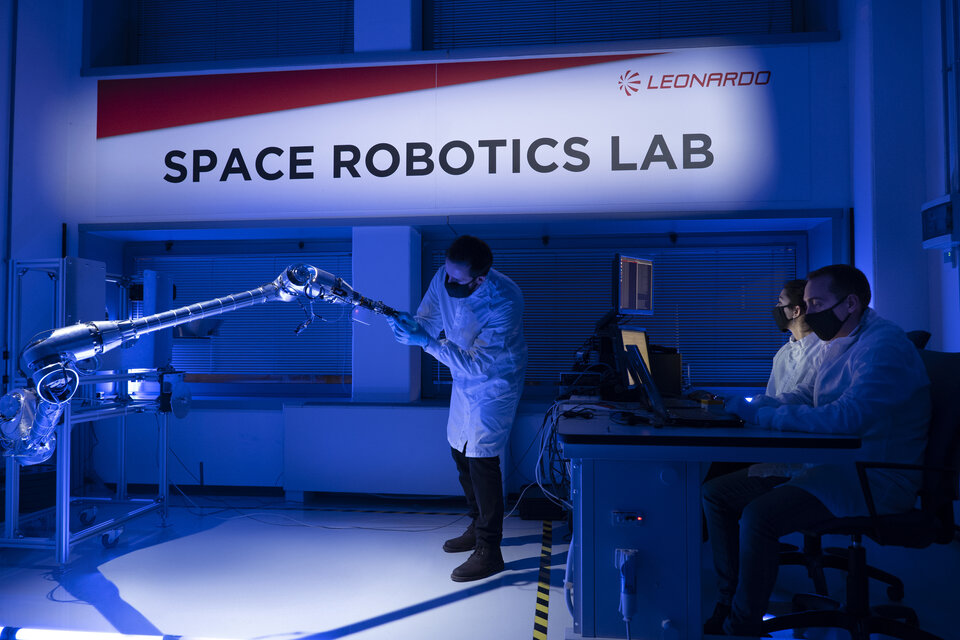 Bras robotisé pour la mission martienne. Photo : Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Bras robotisé pour la mission martienne. Photo : Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Le robot sera équipé de deux caméras et de plusieurs capteurs. Avec ces appareils, il pourra déterminer indépendamment le meilleur plan d'action et coordonner les mouvements en conséquence.
Le bras robotique fait partie de la mission Mars Sample Return. Il se compose de trois parties et vise à ramener sur Terre des échantillons collectés sur la planète rouge d'ici 2033.
 Schéma de la mission Mars Sample Return. Image : EKA
Schéma de la mission Mars Sample Return. Image : EKA
Une fois que le rover a collecté les échantillons nécessaires,il reviendra sur la rampe de lancement. À l'aide d'un manipulateur, le sol collecté sera chargé dans un conteneur et scellé hermétiquement. Le robot fermera le couvercle du conteneur et les échantillons martiens seront lancés en orbite. Là, ils seront récupérés par l'ESA Earth Return Orbiter (ERO), qui ramènera le matériau sur Terre.
Image de couverture : Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Lire la suite:
Les physiciens ont trouvé une "horloge" universelle dans l'espace : elles sont plus précises que l'atomique
Les archéologues ont trouvé des dessins de personnes effrayantes avec des têtes énormes : qui ils étaient
Le télescope James Webb a pris la première photo de Jupiter : il montre 9 cibles mobiles à la fois